Введение………………………………………………………………..2
1. Психофизиологическая основа организации движений……...3
1.1. Принцип сенсорных коррекций…………………………….4
1.2. Схема рефлекторного кольца………………………………6
1.3. Уровни построения движений……………………………..7
2. Формирование двигательных навыков……………………….10
2.1. Структура двигательных навыков ………...……………10
2.2. Природа навыка и тренировки. ………………………….12
З. Уровневый подход при анализе механизмов психической деятельности……………………………………………………..…..15
3.1.Внимание и деятельность…………………………………15
3.2.Восприятие…………………..………………………………20
Заключение…………………………………………………………..26
Список литературы…………………………………………………27
Введение.
Существующее в настоящее время в психологии представление о физиологии движений были сформулировано и экспериментально обосновано выдающимся российским ученым Н. А. Бернштейном.
Врач-невропатолог по образованию, физиолог по своим научным интересам, Н. А. Бернштейн выступал в научной литературе как страстный защитник принципа активности - одного из тех принципов, на которых строится психологическая теория деятельности. В 1947 г. вышла одна из основных книг Бернштейна «О построении движений», которая была удостоена Государственной премии. В этой книге был высказан ряд совершенно новых идей. Одна из них состояла в опровержении принципа рефлекторной дуги как механизма организации движений и замене его принципом рефлекторного кольца.
Цель данной работы является анализ основных аспектов теории построения движений Н. А. Берштейна.
Объект изучения-закономерности организации движения.
Задачи работы:
1) Описать психофизиологическую основу организации движений;
2) Рассмотреть механизмы формирования навыков;
3) Выделить основные механизмы психической деятельности, такие как: внимание и восприятие.
1. Психофизиологическая основа организации движений.
В трудах Н. А. Бернштейна нашла блестящую разработку проблема механизмов организации движений и действий человека. Занимаясь этой проблемой, Н. А. Бернштейн обнаружил себя как очень психологично мыслящий физиолог, в результате его теория и выявленные им механизмы оказались органически сочетающимися с теорией деятельности; они позволили углубить наши представления об операционально-технических аспектах деятельности.
Н. А. Бернштейн выступил в научной литературе как страстный защитник принципа активности - одного из тех принципов, на которых покоится психологическая теория деятельности.
В 1947 г. вышла одна из основных книг Н. А. Бернштейна "О построении движения", которая была удостоена Государственной премии. В этой книге были отражены итоги почти тридцатилетней работы автора и его сотрудников в области экспериментальных, клинических и теоретических исследований движений и высказан ряд совершенно новых идей.
Одна из них состояла в опровержении принципа рефлекторной дуги как механизма организации движений и замене его принципом рефлекторного кольца. Этот пункт концепции H.A. Бернштейна содержал, таким образом, критику господствовавшей в то время в физиологии высшей нервной деятельности точки зрения на механизм условного рефлекса как на универсальный принцип анализа высшей нервной деятельности .
Объектом изучения Н. А. Бернштейн сделал естественные движения нормального, неповрежденного организма, и, в основном, движения человека. Таким образом, сразу определился контингент движений, которыми он занимался; это были движения трудовые, спортивные, бытовые и др. Конечно, потребовалась разработка специальных методов регистрации движений, что с успехом осуществил Бернштейн.
До работ Н. А. Бернштейна в физиологии бытовало мнение (которое излагалось и в учебниках), что двигательный акт организуется следующим образом: на этапе обучения движению в двигательных центрах формируется и фиксируется его программа; затем в результате действия какого-то стимула она возбуждается, в мышцы идут моторные командные импульсы, и движение реализуется. Таким образом, в самом общем виде механизм движения описывался схемой рефлекторной дуги: стимул - процесс его центральной переработки (возбуждение программ) - двигательная реакция.
Первый вывод, к которому пришел Н. А. Бернштейн, состоял в том, что так не может осуществляться сколько-нибудь сложное движение. Вообще говоря, очень простое движение, например коленный рефлекс или отдергивание руки от огня, может произойти в результате прямого проведения моторных команд от центра к периферии. Но сложные двигательные акты, которые призваны решить какую-то задачу, достичь какого-то результата, так строиться не могут. Главная причина состоит в том, что результат любого сложного движения зависит не только от собственно управляющих сигналов, но и от целого ряда дополнительных факторов .
Общие свойства: все они вносят отклонения в запланированный ход движения, сами же не поддаются предварительному учету. В результате окончательная цель движения может быть достигнута, только если в него будут постоянно вноситься поправки, или коррекции. А для этого ЦНС должна знать, какова реальная судьба текущего движения. Иными словами, в ЦНС должны непрерывно поступать афферентные сигналы, содержащие информацию о реальном ходе движения, а затем перерабатываться в сигналы коррекции.
1.1. Принцип сенсорных коррекций.
Н. А. Бернштейн предложил совершенно новый принцип управления движениями, который был назван принципом сенсорных коррекций. Рассмотрим факторы, которые, по мнению Бернштейна, оказывают влияние на ход выполнения движения.
Во-первых, это реактивные силы . И рассматривал пример: например, если человек сильно взмахнет рукой, то в других частях тела у него разовьются реактивные силы, которые изменят их положение и тонус.
Во-вторых, это инерционные силы. Если человек резко поднимет руку, то она взлетает вверх не только за счет тех моторных импульсов, которые посланы в мышцы, но с какого-то момента движется по инерции, т. е. возникают определенные инерционные силы. Н. А. Бернштейн считал, что явление инерции присутствует в любом движении.
В-третьих, это внешние силы , которые оказывают влияние на ход выполнения движения. Пример: если движение направлено на какой-либо предмет, то оно встречает с его стороны сопротивление. И это сопротивление чаще всего оказывается непредсказуемым.
Четвертый фактор, по мнению Н. А. Бернштейна: существует еще один фактор, который не всегда учитывается при начале выполнения движений, - это исходное состояние мышц. Состояние мышцы меняется при выполнении движения вместе с изменением ее длины, а также в результате утомления и других причин. Поэтому один и тот же моторный импульс, достигнув мышцы, может дать совершенно иной результат.
Существует целый перечень факторов, оказывающих непосредственное воздействие на ход выполнения движения. Центральной нервной системе, по мнению Бернштейна необходима постоянная информация о ходе выполнения движения. Эта информация получила название сигналов обратной связи. Эти сигналы могут одновременно поступать от мышц в мозг по нескольким каналам. Он приводит пример: когда мы двигаемся, информация о положении отдельных частей тела поступает от проприоцептивных рецепторов. Однако параллельно информация поступает через органы зрения. Аналогичная картина наблюдается даже при выполнении речевых движений. Человек получает информацию не только от рецепторов, контролирующих движения языкового аппарата, но и через слух. Причем информация, поступающая по разным каналам, должна быть согласованной, иначе выполнение движения становится невозможным.
1.2.Схема рефлекторного кольца.
Существует определенная схема осуществления механизмов движения. Она была названа Бернштейном схемой рефлекторного кольца. Эта схема основана на принципе сенсорных коррекций и является его дальнейшим развитием.
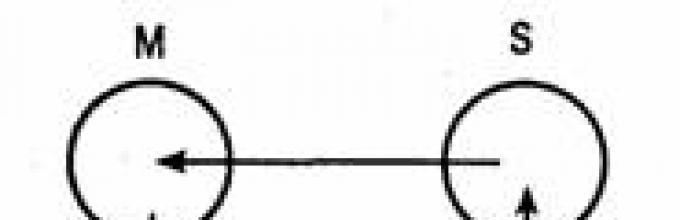
В упрощенном виде эта схема выглядит так: из моторного центра (М) в мышцу (рабочую точку мышцы) поступают эффекторные команды. От рабочей точки мышцы идут афферентные сигналы обратной связи в сенсорный центр. В ЦНС происходит переработка поступившей информации, т. е. перешифровка ее в моторные сигналы коррекции, после чего сигналы вновь поступают в мышцу. Получается кольцевой процесс управления.
 |
Принципиальное различие концепций построения движений на основе рефлекторной дуги и рефлекторного кольца.
В этой схеме рефлекторная дуга выглядит как один из ее частных случаев, когда совершаются движения, не нуждающиеся в коррекции, т. е. движения рефлекторной природы. Позднее Бернштейн детализировал схему рефлекторного кольца. В схеме присутствуют следующие элементы: моторные «выходы» (эффектор), сенсорные «входы» (рецептор), рабочая точка или объект (если речь идет о предметной деятельности), блок перешифровки, программа, регулятор, задающий прибор, прибор сличения.
С наличием большего количества элементов рефлекторное кольцо функционирует таким образом: в программе записаны последовательные этапы сложного движения. В каждый конкретный момент отрабатывается какой-то частный этап или элемент, соответствующая частная программа запускается в задающий прибор. Из задающего прибора сигналы (SW - «то, что должно быть») поступают на прибор сличения. На тот же блок от рецептора приходят сигналы обратной связи (IW - «то, что есть»), сообщающие о состоянии рабочей точки. В приборе сличения эти сигналы сравниваются, и на выходе из него получаются сигналы рассогласования (В\У) между требуемым и фактическим положением вещей. Далее они попадают на блок перешифровки, откуда выходят сигналы коррекции, которые через промежуточные инстанции (регулятор) попадают на эффектор.
В данной схеме, по мнению Бернштейна необходимо обратить внимание на одну деталь: рецептор не всегда посылает сигналы на прибор сличения и бывают случаи, когда сигнал поступает сразу на задающий прибор. Это бывает в тех случаях, когда экономичнее перестроить движение, чем его корректировать. Это особенно важно в экстренных ситуациях.
1.3. Уровни построения движений.
Помимо рефлекторного кольца Бернштейн выдвинул идею об уровневом построении движений.В ходе своих исследований он обнаружил, что в зависимости от
 |
того, какую информацию несут сигналы обратной связи - сообщают ли они о степени напряжения мышц, об относительном положении частей тела, о предметном результате движения и т. д., - афферентные сигналы приходят в разные чувствительные центры головного мозга и переключаются на моторные пути на разных уровнях. Под уровнем следует понимать буквально «слои» в ЦНС, Так были выделены уровни спинного и продолговатого мозга, уровень подкорковых центров, уровень коры. Каждый уровень имеет специфические, свойственные только ему моторные проявления, каждому уровню соответствует свой класс движений.
Уровень А - самый низкий и филогенетически самый древний. У человека он не имеет самостоятельного значения, но отвечает за важнейший аспект любого движения - тонус мышц. На этот уровень поступают сигналы от мышечных проприорецепторов, которые сообщают о степени напряжения мышц, а также информация от органов равновесия. Самостоятельно этот уровень регулирует весьма немногочисленные движения. В основном они связаны с вибрацией и тремором. Например, стук зубов от холода.
Уровень В - уровень синергий. На этом уровне перерабатываются сигналы в основном от мышечно-суставных рецепторов, которые сообщают о взаимном положении и движении частей тела. Этот уровень оторван от внешнего пространства, но очень хорошо «осведомлен» о том, что делается в «пространстве тела». Уровень В принимает большое участие в организации движений более высоких уровней, и там он берет на себя задачу внутренней координации сложных двигательных ансамблей. К собственным движениям этого уровня относятся потягивания, мимика и т. д.
Уровень С. Этот уровень Бернштейн назвал уровнемпространственного поля . На данный уровень поступают сигналы от зрения, слуха, осязания, т. е. вся информация о внешнем пространстве. Поэтому на данном уровне строятся движения, приспособленные к пространственным свойствам объектов - к их форме, положению, длине, весу и пр. К движениям данного уровня относятся все переместительные движения.
Уровень D - уровень предметных действий. Это уровень коры головного мозга, отвечающий за организацию действий с предметами. К этому уровню относятся все орудийные действия и манипуляции с предметами. Движения на этомуровне представлены как действия.В них не фиксирован двигательный состав, или набор движений, а задан лишь конкретный результат.
Уровень Е - наивысший уровень - уровень интеллектуальных двигательных актов. К этому уровню относятся: речевые движения, движения письма, движения символической или кодированной речи. Движения этого уровня определяются не предметным, а отвлеченным, вербальным смыслом.
Рассматривая построение уровней движения, Бернштейн делает несколько очень важных выводов. Во-первых, в организации движений участвуют, как правило, сразу несколько уровней - тот, на котором строится движение и все нижележащие уровни. Так, например, письмо - это сложное движение, в котором участвуют все пять уровней. Уровень А обеспечивает тонус мышц. Уровень В придает движениям плавную округлость и обеспечивает скоропись. Уровень С обеспечивает воспроизведение геометрической формы букв, ровное расположение строк на бумаге. УровеньD обеспечивает правильное владение ручкой. Уровень Е определяет смысловую сторону письма. Исходя из этого положения, Бернштейн делает вывод о том, что в сознании человека представлены только те компоненты движения, которые строятся на ведущем уровне, а работа нижележащих уровней, как правило, не осознается. Во-вторых, формально одно и то же движение может строиться на разных ведущих уровнях. Уровень построения движения определяется смыслом, или задачей, движения.Например, круговое движение, в зависимости от того, как и для чего оно выполняется (движение пальцев, движение тела или действие с предметом), может строиться на любом из пяти уровней. Данное положение чрезвычайно интересно для нас тем, что оно показывает решающее значение такой психологической категории, как задача, или цель, движения для организации и протекания физиологических процессов. Этот результат исследований Бернштейна может рассматриваться как крупный научный вклад в физиологию движений.
2. Формирование двигательных навыков.
2.1. Структура двигательных навыков.
Концепция Н. А Берштейна исходит из ряда фундаментальных принципов научения. Во-первых, это принципы упражняемости. Н. А.Берштейн заметил, что, в то время как технические устройства изнашиваются от многократного выполнения того или иного действия, живые организмы характеризуются улучшением каждого следующего исполнения действия по сравнению с предыдущим. Во-вторых, речь идет о принципе «повторения без повторения», заключающемся в том, что каждое новое действие-не слепое копирование предшествующего, а его развитие. По мнению Н. А. Берштейна, живое движение-это постоянно совершенствующаяся система, и поэтому его нельзя описывать в механистических терминах «стимул- реакция». В-третьих, Н. А. Берштейн говорил о том, что каждый новый навык-это двигательная задача, которую организм решает при помощи всех наличных средств с учетом внешних и внутренних обстоятельств .
Суть выработки навыка заключается в открытии принципа решения двигательной задачи. В решении двигательной задачи существует несколько этапов.
На первом этапе происходит разделение на смысловую структуру и двигательный состав действия (А что я собственно хочу сделать? Как мне удастся это сделать?). Пример: смысловой структурой может быть желание плыть, а двигательным составом-способ исполнения этого замысла(кроль или брасс).
На втором этапе происходит выявление и роспись («прощупывание») сенсорных коррекций. Одной из значительных услуг Н. А. Берштейна стало то, что он отказался от понятия «рефлекторная дуга», выработанного еще Декартом, и перешел к понятию рефлекторное кольцо . Суть этого перехода заключается в том, что навык не может быть стереотипной последовательностью выученных действий, на всем его протяжении требуется постоянная сверка движения с наличными условиями. Постоянную координирующую информацию, которую наш сенсорный аппарат получает по ходу разворачивания навыка, Н. А. Берштейн и назвал сенсорные коррекции .
Разница между определением двигательного состава и «прощупыванием» сенсорных коррекций заключается в том, что на первом этапе учащийся устанавливает, как выглядят те движения, из которых складывается навык с позиции наблюдателя. А на втором-пытается ощутить эти движения изнутри. На этом этапе необходимо максимальное количество повторений, каждое из которых будет не механическим возобновлением движения, а его модификацией. Работа с навыком осуществляется здесь на сознательном уровне. Человек старается разобраться в движении и подобрать уже готовые двигательные автоматизмы из своего личного репертуара движений. А может быть и создать новые..
Как пишет Н. А. Берштейн: «Секрет освоения движения заключается не в каких-то особых телодвижениях, а в особого рода ощущениях. Их нельзя показать, а можно только пережить».
На этом этапе формирования навыка новое звучание приобретает проблема «переноса» навыка. Феномен переноса навыка заключается в том, что овладение навыком выполнения одной задачи может улучшать результаты выполнения другой задачи.
На третьем этапе формирования происходит «разверстка фонов», т.е. автоматизация двигательного навыка . Сформированные на предшествующем этапе сенсорные коррекции покидают сознание и начинают выполняться автоматически. Постепенно все большая часть навыка становится практически независимой от сознания.
Задачей четвертого этапа является срабатывание фоновых коррекций. Все компоненты навыка интегрируются в единое целое.
Пятый этап – это этап, на котором происходит стандартизация навыка. Навык делается устойчивым, каждое новое его исполнение все более похоже на предшествующее.
И, наконец шестой этап это этап стабилизации. Навык становится устойчивым к помехам, осуществляется будто бы сам собой.
Преимущество концепции Н. А. Берштейна перед всеми описанными выше интерпретациями научения заключается в том, что здесь навык представляется иерархически организованной системой. Формирование процедурной системы памяти включает в себя и наблюдение, и инсайт, и выработку реакций. Только взятые в совокупности все «элементы» научения приводят к успешному освоению навыка.
2.2. Природа навыка и тренировки.
Все прижизненно онтогенетически приобретенные двигательные возможности обозначаются обобщенно термином двигательные навыки , процессы же их намеренной сознательной выработки объединяются в понятии двигательной тренировки . Подобные навыки приобретаются по каждому из координационных уровней, и каждый навык в отдельности часто представляет очень сложную, многоуровневую структуру.
Формирование двигательного навыка есть на каждом этапе активная психомоторная деятельность. Вся диалектика развития навыка состоит в том, что там, где есть развитие , там каждое следующее исполнение лучше предыдущего, т. е. не повторяет его; поэтому упражнение есть в частности повторение без повторения. Разгадка этого кажущегося парадокса в том, что правильно проводимое упражнение повторяет раз за разом не то или иное средство решения данной двигательной задачи, а процесс решения этой задачи, от раза к разу изменяя и совершенствуя средства.
Для каждого двигательного акта, потенциально доступного человеку, в его центральной нервной системе имеется адекватный уровень построения, способный реализовать основные сенсорные коррекции этого акта, соответствующие его смысловой сущности. Но чем сложнее движение, тем многочисленнее и разнообразнее требующиеся для его выполнения сенсорные коррекции. В связи с этим по мере выработки данного двигательного акта в его выполнении начинает принимать целая иерархия уровней. Наивысший из них для данного акта, берущий на себя реализацию основных смысловых коррекций, мы обозначаем как ведущий уровень для этого движения. Подчиненные нижеследующие уровни, обеспечивающие выполнение вспомогательных, технических коррекций, мы называем фоновыми уровнями .
Прижизненно вырабатываемые двигательные фоны обычно обозначаются термином «автоматизмы», а сам процесс их выработки – термином «автоматизация двигательного акта». Оба названия объясняются именно тем, что фоновые компоненты движений остаются за порогами сознания. Как только какая-нибудь группа координационных коррекций переключается из ведущего уровня в фоновый, наиболее адекватный для нее по качеству и составу его коррекций, так она уходит из поля сознания, автоматизируется.
На основе этого краткого схематизированного анализа мы можем яснее проследить физиологические пути выработки нового двигательного навыка в онтогенезе.
В самом начале освоения нового движения все применяемые для него коррекции совершаются на его ведущем уровне. Исключение составляют наиболее обобщенные низовые коррекции, которые являются изначальной подкладкой почти всякого движения, выработавшейся уже на самых ранних стадиях онтогенеза, а также коррекции, случайно имеющиеся в готовом виде от ранее освоенных движений. Так как ни один уровень не универсален настолько, чтобы обладать адекватными коррекциями для всех сторон движения, то поневоле вначале всякое движение совершается неуклюже, при временном содействии более или менее подходящих коррекций, какие данный ведущий уровень в состоянии предоставить данному движению. Отсутствие автоматизмов вызывает при этом большую перегрузку сознания, вынужденного вникнуть в каждую техническую подробность движения. В процессе тренировки происходит постепенное выделение фоновых компонентов, которые переадресовываются ведущим уровнем в тот из более низовых уровней, в котором имеются предпосылки для наилучшего выполнения именно этих коррекций.
По мере выработки в низовых уровнях соответственных фоновых автоматизмов все больший процент технических фонов уходит из поля сознания, разгружая этим ведущий уровень и в то же время находя для себя условия значительно более точного и совершенного исполнения. Из всего изложенного с необходимостью следует, что каждое переключение той или иной компоненты движения из ведущего уровня в фоновый является во-первых, более или менее внезапным скачкообразным изменением в процессе движения, а во-вторых, обязательным качественным скачком, поскольку первоначальные коррекции этой слагающей сменяются при этом качественно совершенно иным.
Процесс разверстки фоновых компонент движения по соответствующим уровням сложен, потому что ему необходимо должно предшествовать определение и выявление этих компонент.
В каждом двигательном акте мы должны различать: 1) его смысловую структуру и 2) и его двигательный состав . Смысловая структура целиком вытекает из существа возникшей двигательной задачи и определяет ведущий уровень построения, которому эта задача приходится «по плечу». Двигательный же состав определяется ни одной только задачей, а ее столкновением с двигательными возможностями особи, устройством кинематических цепей этой особи, наличие того или другого орудия, содержанием накопленного к этому времени психомоторного опыта и т. д. Задачу быстрого переноса своего тела в пространстве человек решает спинтом, лошадь-голопом, птица-полетом,; задачу скрепления двух жестких тел один решает связыванием, другой-- сколачиванием, третий склейкой, спайкой, сваркой и т. п.; задачу вдевания нитки в иглу мужчины и женщины разрешают обычно прямо противоположными способами.
Сущность процесса автоматизации, требующего иногда длительного времени и настойчивого упражнения, состоит именно в выработке центральной нервной системой плана описанной выше разверстки фонов: в определении двигательного состава действия; попутно начинается и само существование этой разверстки указанным выше порядком.
3. Уровневый подход при анализе механизмов психической деятельности.
3.1. Внимание и деятельность.
Вопрос о природе внимания продолжает остро дискутироваться и в наши дни. Один из моментов обсуждения - старая альтернатива: является ли внимание самостоятельным процессом, или оно - сторона, аспект любой психической деятельности. В зарубежной когнитивной психологии эта альтернатива представлена сторонниками теории внимания как специального процесса блокировки, или фильтрации, информации, который обеспечивается работой особого блока, и сторонниками того взгляда, что внимание есть проявление работы всей системы переработки, информации.
В советской психологии также явно присутствуют оба ответа: "внимание - направленность и сосредоточенность любой деятельности" и "внимание-специальная деятельность контроля". Оба представления реализуют так называемый деятельностный подход к вниманию. В то же время, они, как уже отмечалось, достаточно альтернативны. Вторая концепция возникла хронологически позже и содержит в себе критику первой. Однако, на наш взгляд, она способна объяснить значительно меньший круг фактов. Здесь мы попытаемся защитить указанную первую концепцию - представление о внимании как аспекте любой деятельности, придав ей, однако, несколько иную формулировку. Обратиться к этой теме нас заставляет убеждение, что потенциальные возможности психологической теории деятельности в отношении понимания природы внимания значительно превосходят те реализации, которые существуют к настоящему времени.
Однако прежде необходимо обсудить вопрос о том, что же такое внимание. Этот вопрос на протяжении всего существования научной психологии поднимался вновь и вновь. Разные авторы давали разные ответы, но и к настоящему времени здесь нет полной ясности и единодушия. В сложившейся ситуации лучше всего обратиться к фактической стороне дела и перечислить те признаки или критерии внимания, которые несомненны и признаются большинством исследований.
1. Первым по хронологическим основаниям, да и по существу, должен быть назван феноменальный критерий - ясность и отчетливость содержаний сознания, находящихся в поле внимания. Для представителей психологии сознания этот критерий был главным и единственным. Однако очень быстро обнаружился его принципиальный методический недостаток - трудности использования его в интересах исследования внимания. Эти трудности оказались связаны не только с существованием плохо уловимых степеней субъективной ясности, но и вообще с трансформацией качества ясности в процессе самонаблюдения. В результате усилия психологов направились на поиски более "осязаемых", объективных критериев. И все же, несмотря на потерю монопольного положения феноменального критерия, он и теперь остается одним из наиболее важных и безусловных при описании явлений внимания.
2. К объективным относится критерий, который может быть условно назван "продуктивным" критерием . Он характеризует не столько сам "процесс" или состояние внимания, сколько его результат. Это - повышенное или улучшенное качество продукта "внимательного" действия (перцептивного, умственного, моторного) по сравнению с "невнимательным". В случае умственной или перцептивной деятельности этот продукт имеет когнитивный характер: более глубокое понимание, более полное восприятие и т.п. В случае исполнительной деятельности речь идет о качестве внешнего материального результата.
3. Следующий критерий - мнемический , критерий, который выражается в запоминании материала, находившегося в поле внимания. Хотя этот критерий также может быть отнесен к "продуктивным" эффектам внимания, его стоит выделить особо, хотя бы потому, что он - не прямой, а побочный продукт любого внимательного действия (если только речь не идет о специальном мнемическом действии).
4. Внешние реакции - моторные , познотонические, вегетативные, обеспечивающие условия лучшего восприятия сигнала. К ним относятся: поворот головы, фиксация глаз, мимика и поза сосредоточения, задержка дыхания, вегетативные компоненты ориентировочной реакции и т.д.
5. Наконец, последний по порядку, но отнюдь не по важности, критерий избирательности , который по существу присутствует как бы внутри каждого из перечисленных критериев: он выражается в отграниченности поля ясного сознания от периферии сознания; в возможности активно воспринимать только часть поступающей информации и делать только одно дело; в запоминании только части воспринятых впечатлений; в установке органов чувств и реагировании только на ограниченный круг внешних сигналов. Может быть, ввиду обозначенной универсальности этого критерия, ему придается в последнее время особенное значение, так что термины "внимание" и "селективность" во многих работах стали употребляться как синонимы.
Рассмотрение проблемы внимания в истории экспериментальной психологии показывает, что не только плодотворное исследование этого психического феномена, но и само его определение требует реализации одновременного многопланового подхода - подхода со стороны сознания, со стороны деятельности и со стороны физиологических процессов.
Метод многопланового анализа психики успешно разрабатывался в исследованиях А.Н. Леонтьева.
В истории психологии хорошо известны отдельные школы, направления и целые эпохи, в которых осуществлялось движение только в одном из названных планов. Таковы, например, "одноплановые" направления психологии сознания и поведенческой психологии, которые довольно быстро исчерпали свои объяснительные и эвристические возможности. Гораздо более стойкими и перспективными оказались "двухплановые" схемы. В планах сознания - и физиологии начал работать еще В. Вундт, и за вычетом сугубо параллелистической вундтовской методологии это направление оказалось настолько перспективным, что породило особые смежные дисциплины - психофизиологию, нейропсихологию и др. Значительно более поздними и гораздо более близкими нам явились схемы, объединяющие планы сознания - и деятельности, деятельности - и физиологии. Они возникли и были существенно развиты в рамках отечественной науки и особенно психологии советского периода.
Краеугольное положение советской марксистской психологии о том, что сознание есть производное от бытия, деятельности человека, не только получило в трудах А.Н. Леонтьева общетеоретическую разработку, но и было использовано как эвристический принцип при конкретно-психологической разработке проблемы сознания. Если при этом в отдельных исследованиях А.Н. Леонтьев ограничивался анализом связей двух планов - сознания и деятельности, то всему стилю его научного мышления был присущ постоянный охват всех трех названных планов. Это сказалось и в том, насколько органически ему удалось вписать в категориальный аппарат психологической теории деятельности физиологические процессы в качестве реализаторов и средств деятельности; и в том, сколько места он уделял в других своих работах связям второй диады: деятельности - и физиологических механизмов; и, наконец, в тех высоких оценках, которые находили у него работы других авторов, глубоко использующих "деятельностную" ориентацию при исследовании физиологических процессов.
Блестящим примером исследований этого типа А.Н. Леонтьев считал физиологическую концепцию уровней построения движений Н.А. Бернштейна. Как известно, Н.А. Бернштейну принадлежит доказательство фундаментального положения о том, что задача движения, или его смысловая сторона, определяет неврологический уровень, на котором происходит построение движения. Это положение по своей научной важности соизмеримо с закономерностью о зависимости плана сознания от строения деятельности. Здесь, в главной идее Н.А. Бернштейна, как и в обозначенной закономерности, содержится указание на направление причинно-следственных связей: от задачи двигательного акта, следовательно, от строения деятельности,- к неврологическим структурам и физиологическим процессам, а не наоборот. Вместо того чтобы искать объяснение психических феноменов и процессов через анализ физиологических механизмов, как это свойственно традиционному физиологическому мышлению, данная теория показывает необходимость обратного хода: использования психологических, деятельностных категорий для понимания физиологических процессов.
А.Н. Леонтьев не только высоко ценил концепцию Н.А. Бернштейна за этот ее внутренний "психологизм"; в совместной работе с А.В. Запорожцем он сделал также личный вклад в исследование и практическое использование в терапевтических целях тех же деятельностно - физиологических отношений.
3.1. Восприятие.
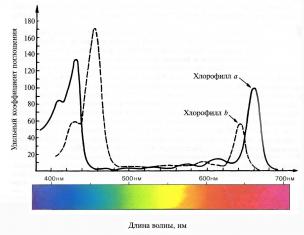
Остается сказать еще об одном ущербе, понесенном физиологией от подмены реальных двигательных актов, разрешающих возникшую объективную задачу, обломками движений почти артефактного характера. Этот последний ущерб, до сего времени не подчеркивавшийся в достаточной степени, очень сильно обеднил наши познания в области рецепторной
физиологии и при этом содержал в себе корни важных методологических ошибок.
В роли приемника пусковых сигналов, включающих в действие ту или иную рефлекторную дугу - единственной роли, изучавшейся физиологами классического направления, рецепторные системы, у высокоорганизованных животных и у человека, функционируют существенно и качественно иначе, нежели в роли следящих и корригирующих приборов при выполнении двигательного акта. Это различие можно уяснить, если, став снова на точку зрения биологической значимости, направить внимание на те качества, которые в том и другом случае должны были отсеиваться путем естественного отбора.
Для сигнально-пусковой функции рецептору существенно иметь высокую чувствительность, т. е. максимально низкие пороги как по абсолютной силе сигнала, так и по различению между сигналами. На первый план по биологической значимости здесь выступают телерецепторы
обоняния, слуха (также ультраслуха) и зрения в различных ранговых порядках у разных видов животных. Для вычленения, далее, значимых сигналов из хаотического фона «помех» нужна и необходимо вырабатывается совершенная аналитическая или анализаторная
способность реципирующих аппаратов центральной нервной системы (вполне естественно, что И. П. Павлов, в столь большой степени углубивший наши знания по сигнально-пусковой функции рецепторов, присвоил им название анализаторов
, только в самые последние годы его жизни дополненное приставкой «синтез»).
Для этой же сигнально-пусковой роли важнейшим механизмом (который предугадывался уже И. М. Сеченовым и был впоследствии отчетливо экспериментально выявлен исследователями, отправлявшимися от практических задач военного наблюдения) является совокупность процессов активного систематизированного поиска (scanning) или «просматривания» своего диапазона каждым из телерецепторов. Это процессы целиком активные, использующие эффекторику в полной аналогии с тем, как последняя эксплуатирует афферентацию в управлении движениями, но, замечу сразу, не имеющие ничего общего с процессами привлечения организованных двигательных актов к целостному активному восприятию объектов внешнего мира, о чем будет речь дальше.
Когда же двигательный смысловой акт уже «запущен в ход» тем или иным сенсорным сигналом, требования, предъявляемые биологической целесообразностью и приведшие к сформированию в филогенезе механизма кольцевого сенсорного корригирования
, оказываются существенно иными. Что бы ни представляли собой возникшая двигательная задача и тот внешний объект, на который она направлена, для правильной, полезной для особи реализации этой задачи необходимо максимально полное и объективное восприятие как этого объекта, так и каждой очередной фазы и детали собственного действия, направленного к решению данной задачи.
Первая из названных черт рецепторики в этой ее роли - полнота, или синтетичность - обеспечивается хорошо изученными как психо-, так и нейрофизиологами сенсорными синтезами (или сенсорными полями). К их числу относятся, например, схема своего тела, пространственно-двигательное поле, синтезы предметного или «качественного» (топологического) пространства и др. Роль этих «полей» в управлении двигательными актами автор пытался подробно обрисовать в книге о построении движений. Здесь достаточно будет только напомнить: 1) что в этой функциональной области синтетичность работы рецепторных приборов фигурирует уже не декларативно (как было выше), а как реально прослеженный на движениях в их норме и патологии основной факт и 2) что в каждом из таких сенсорных синтезов, обеспечивающих процессуальное управление двигательными актами, структурная схема объединения между собой деятельности разных проприо-, танго- и телерецепторов имеет свои специфические, качественно и количественно различные свойства. При этом слияние элементарных информации, притекающих к центральным синтезирующим аппаратам от периферических рецепторов, настолько глубоко и прочно, что обычно почти недоступно расчленению в самонаблюдении. И в описываемой функции принимают участие все или почти все виды рецепторов (может быть только за исключением вкусового), но уже в существенно иных ранговых порядках. На первом плане оказывается здесь обширная система проприорецеп-торов в узком смысле. Далее она обрастает соучастием всей танго- и телерецепторики, организовавшейся на основе всего предшествующего практического опыта для выполнения роли «функциональной проприоцепторики». О других, еще только намечающихся чертах чисто физиологического своеобразия работы рецепторов в обсуждаемом круге функций - параметрах адаптации, порогевс «по сличению», периодичности функционирования и др.- будет сказано во второй части очерка.
Вторая из названных выше определяющих черт рецепторики как участника кольцевого координационного процесса - объективность - имеет настолько важное принципиальное значение, что на ней необходимо остановиться более подробно.
В той сигнальной (пусковой или тормозной) роли, которая одна только и могла быть замечена при анализе рефлексов по схеме незамкнутой дуги и которая повела к обозначению всего комплекса органов восприятия в центральной нервной системе термином «сигнальная система»
, от афферентной функции вовсе не требуется доставления объективно верных информации. Рефлекторная система будет работать правильно, если за каждым эффекторным ответом будет закреплен свой неизменный и безошибочно распознаваемый пусковой сигнал - код. Содержание этого кода, или шифра, может быть совершенно условным, нимало не создавая этим помех к функционированию системы, если только соблюдены два названных сейчас условия.
Совершенно иными чертами характеризуется работа рецепторной системы при несении ею контрольно-координационных функций по ходу решаемой двигательной задачи. Здесь степень объективной верности
информации является решающей предпосылкой для успеха или неуспеха совершаемого действия. На всем протяжении филогенеза животных организмов естественный отбор неумолимо обусловливал отсев тех особей, у которых рецепторы, обслуживавшие их двигательную активность, работали как кривое зеркало. В ходе онтогенеза каждое столкновение отдельной особи с окружающим миром, ставящее перед особью требующую решения двигательную задачу, содействует, иногда очень дорогой ценой, выработке в ее нервной системе все более верного и точного объективного отражения
внешнего мира как в восприятии и осмыслении побуждающей к действию ситуации, так и в проектировке и контроле над реализацией действия, адекватного этой ситуации. Каждое смысловое двигательное отправление, с одной стороны, необходимо требует не условного, кодового, а объективного, количественно и качественно верного отображения окружающего мира в мозгу. С другой стороны, оно самое является активным орудием правильного познания этого окружающего мира. Успех или неуспех решения каждой активно пережитой двигательной задачи ведет к прогрессирующей шлифовке и перекрестной выверке показаний упоминавшихся выше сенсорных синтезов и их составляющих, а также к познанию через действие, проверке через практику, которая является краеугольным камнем всей диалектико-материалистической теории познания.
Для превращения любого надпорогового агента в условный пусковой раздражитель того или другого органического рефлекса требуется всегда обеспечение двух условий: 1) главного - встречи или сочетания в пределах обычно небольшого интервала времени этого агента с реализацией данного рефлекса и 2) побочного - некоторого числа повторений такого сочетания. Первое из этих условий прямо относит разбираемый феномен к циклу ассоциаций по смежности
, как раз характеризующихся безразличием к смысловому содержанию ассоциируемых представлений или рецепций. Интересно отметить, что для преобразования индифферентного раздражителя в условно-пусковой существенно совмещение его с эффекторной,
а не с афферентной частью безусловного рефлекса, которая мобилизуется в типовом эксперименте только как средство заставить сработать эффекторную полудугу. Это доказывается, например, фактом осуществимости так называемых условных рефлексов второго порядка, когда индифферентный раздражитель приобретает пусковые свойства для данного рефлекса, несмотря на то, что эффекторная часть последнего запускается в действие не безусловным, а ранее привитым к рефлексу условным же раздражителем первого порядка.
Другое доказательство сказанного можно усмотреть в том, что в методах, применяемых при дрессировке, поощрительное подкрепление «безусловным» афферентным импульсом подкормки животного производится после правильного выполнения им требуемого действия по соответствующей условной команде и не является при этом безусловным пусковым раздражителем дрессируемого действия. Эта недооценивавшаяся раньше деталь заслуживает внимания в настоящем контексте потому, что образование ассоциативной связи в мозгу между условным афферентным
процессом и эффекторной
частью рефлекса, как нам кажется, можно осмыслить только, если эта эффекторная реализация рефлекса отражается (опять-таки по кольцевой обратной связи) назад в центральную нервную систему и может уже сочетаться ассоциативно с афферентным же процессом условного раздражения. Это могло бы послужить еще одним подтверждением того, что возвратно-афферентационные акты как непосредственные соучастники процесса и в классических рефлексах - «дугах» - не отсутствуют, а лишь пока ускользают от наблюдения.
Второе из условий образования условной связи, названное выше побочным, а именно надобность некоторого числа повторных сочетаний, было бы трудно объяснить сейчас иначе, как необходимостью для подопытной особи выделить прививаемую новую рецепцию из всего хаоса бомбардирующих ее извне воздействий. Число повторений должно оказаться достаточным для того, чтобы определилась неслучайность совмещения во времени интеро- или проприоцепции реализующегося рефлекса именно с данным элементом всей совокупности экстерорецепций. В этом смысле - в отношении необходимого и достаточного числа повторений - раздражитель, индифферентный по своему смысловому содержанию, может оказаться относительно труднее и длительнее вычленяемым как могущий не привлечь к себе интереса и внимания («ориентировочной реакции») особи. Старую наивно-материалистическую концепцию о постепенных «проторениях» путей или синаптических барьеров в центральной нервной системе можно уже считать сданной в архивы науки.
Заключение.
В заключении хочется сказать о значении идей. Н.Бернштейна для
психологии. Оно велико и многопланово. Несмотря на общую физиологическую ориентацию, Н. А. Бернштейн внес большой вклад в несколько разделов психологии. Он обогатил представления о функциях рецепции, выделив особую функцию - контрольно-коррекционную (функция чувствительных сигналов обратной связи).
Он произвел, конечно, революцию в области психофизиологии движений: сегодня ни одно исследование движений человека невозможно без глубокого знания и учета всего того, что было сделано Бернштейном в этой области. Особенно важна для психологии его идея о решающей роли задачи в организации движений.
Трудно переоценить вклад Н. А. Бернштейна в проблему формирования навыка: он по-новому рассмотрел ее физиологические, психологические и педагогические аспекты.
Теория уровней Н. А. Бернштейна по своему значению выходит за рамки проблемы организации движений. Существуют многочисленные попытки применить положения этой теории к процессам восприятия, внимания, мышления и т. п.
Наконец, благодаря работам Н. А. Бернштейна психология получила доказательства справедливости принципа активности "снизу", т. е. со стороны физиологии.
В данной работе была описана психофизиологическая основа организаии движений (принцип сенсорных коррекций, схема рефлекторного кольца, уровни построения движений). Также были рассмотрены механизмы формирования навыка. Были выделены основные механизмы психической деятельности, такие как: восприятие и внимание.
Список литературы.
1.Бернштейн Н.А. Биомеханика и физиология движений: Избранные психологические труды / Н. А. Бернштейн; Под ред. В. П. Зинченко.- 3-е изд., стер. М.: изд-во МПСИ; Воронеж.2008.
2. Бернштейн Н.А. Назревшие проблемы регуляции двигательных актов // Хрестоматия по курсу «Введение в психологию» / Ред.- сост. Е. Е. Соколова. –М., 1999.
3. . Бернштейн Н.А. Уровни построения движений.
// Хрестоматия по курсу «Введение в психологию» / Ред.- сост. Е. Е. Соколова. –М., 1999.
4. Бернштейн Н. А. Природа навыка и тренировки.//Хрестоматия по курсу «Психология памяти»/ Под ред. Гиппенрейтер Ю. Б и Романова В. Я. М.: ЧеРо 2000.
5. Берштейн Н. А. О ловкости и ее развитии.-М.,1991г.
6. Гиппенрейтер Ю.Б. Введение в общую психологию. Курс лекций.- М.: ЧеРо, МПСИ, Омега-Л, 2006.
7. Гиппенрейтер Ю.Б. и Романов В. Я. Деятельность и внимание. – М.: ЧеРо, 2000г.
8. Дормашев Ю. Б, Романов В. Я. Психология внимания.Учебник.-4-е изд.-М.: МПСИ. 2007.
9. Любимов В. В. Психология восприятия. Учебник.- М.: Эксимо, ЧеРо, Мпси, 2007.
10. Леонтьев А. Н. Лекции по общей психологии.- М., 2000г.
11. Нуркова В.В. Общая психология. В 7 т.: учебник для студ. высш. учебн.заведений / под ред. Б. С. Братуся.- Т.3.Память.- М.: Изд. Центр «Академия», 2006.
12. Соколова Е. Е. Общая психология: в 7 т. под ред. Б. С. Братуся. Том 1. Введение в психологию: учебник для студ. высш. учеб. заведений.- 3-е изд.,стер.- м.: Издат. Центр « Академия», 2008.
Уровни построения движений. Сенсорные коррекции и два цикла взаимодействий как принцип саморегуляции двигательной системы в норме и патологии. Теория воспитания навыка. Классификация двигательных расстройств при ДЦП по признаку дефектного уровня координации.
Движение - качество, присущее всему живому, будь это ток жидкости в растениях, кровяных клеток в сосудистом русле, перемещение животных и человека в пространстве или социально обусловленные действия индивидуума.
Становление движения, совершенствование его качеств, таких, как скорость, точность, плавность и т. д., суть процесс, подчиняющийся универсальным законам построения движений. В основе его лежит совершенствование координаций (совместный - от лат. ordinatio - упорядочивание, взаимосвязь, приведение в соответствие. В биологии - соотносительное развитие органов и частей организма в их историческом развитии).
Законы построения движений впервые определены нашим соотечественником Н.А.Бернштейном в сороковых - пятидесятых годах. Энциклопедия сообщает: “Бернштейн Николай Александрович (1896- 1966) - нейро- и психофизиолог, создатель физиологии активности. Его исследования по физиологии движений стали теоретической основой современной биомеханики, некоторые его идеи предвосхитили ряд положений кибернетики”. На основе выведенных им законов развивалась наука об искусственных управляющих системах, манипуляторах, роботах. Научная судьба его, к сожалению, напоминает судьбу прогрессивных биологов н генетиков того времени.
Принципы Бернштейна затем расшифровывались и конкретизировались множеством исследователей (Анохин П.К., Гурфинкель В.С., 1960, и др.).
Движения человека имеют в своем развитии начало, период, когда качества движения (скорость, точность и др.) достигают совершенства, и инволюцию - угасание, потерю этих качеств.
Наиболее заметен этот принцип в формировании локомоции, в частности, ходьбы (локомоция - от лат. lokus - место и motio - движение. В биологии - это циклически повторяющаяся закономерная сумма автоматических движений, обеспечивающих активное передвижение в пространстве, - ходьба, плавание, полет птиц и т. д.).
Мы все наблюдали, как неуклюжие, неточные движения ребенка 1 - 1,5 лет становятся по-своему милыми и грациозными к 3 - 5 годам.
В возрасте пубертатагормональные, возмущения снова делают движения угловатыми, резкими, неловкими. К старости механизмы управления изнашиваются, и движения становятся суетливыми, неуверенными. Пожилой человек долго топчется перед тем, как спуститься с подножки автобуса, перешагнуть лужу, как бы примериваясь к пространству. Сохранить устойчивость при ходьбе все труднее, и старый человек намеренно сокращает переносной период шага, т. к. опора на одну ногу в этот момент несет в себе риск потери устойчивости - походка становится шаркающей.
Известно огромное влияние эмоций на рисунок движений: ходьба пленного и победителя не сравнима, хотя состоит из одинаковых структурных элементов. Движения балерины, мима - это безмолвное выражение всей гаммы чувств от трагедии до триумфа, глухонемым движения рук и лица заменяют речь. Движениями можно изобразить умирающего лебедя и даже растаявшее мороженое и высыхающий сыр.
Такое совершенство движений не наследуется. Младенец не имеет качественных характеристик движений отца и матери. Он вновь проходит весь путь развития движений - от самых примитивных до высококоординированных и социально значимых действий. Каков этот путь, как он связан с развитием структур мозга и периферических механизмов, каким образом происходит развитие навыка, совершенствование качеств движения - на эти вопросы отвечает теория построения движений, предложенная Бернштейном. Она включает в себя несколько основных положений:
первое положение - о единстве онто- и филогенеза движений; второе положение - о ступенчатом развитии движений, об уровнях построения движений в ЦНС;
третье положение - о рефлекторном кольце и сенсорных коррекциях;
четвертое положение - о двух циклах взаимодействия; пятое положение - о развитии навыка.
Остановимся подробнее на каждом из этих постулатов.
Движение - свойство, общее для всего животного мира. В конечном итоге - это борьба за жизнь. От качеств движения зависит - “тебя съедят или ты съешь”, что и составляет сущность закона о естественном отборе: выживает сильнейший, обладающий высокой скоростью, ловкостью, выносливостью, быстротой реакции, умением попасть в цель, защищенный панцирем и т. д. Поэтому так сложны, многократно дублированы на всех этапах развития структуры головного мозга, управляющие движением, поэтому так длителен и тщателен процесс совершенствования механизмов координации и поэтому при локальных поражениях мозга травмой или болезнью движение, хотя и приобретает патологический характер, но не исчезает совсем. Природа не утрачивает в этом процессе ни одного из своих более ранних приобретений.
Формирование движений человека, локомоции в том числе, в онтогенезе повторяют филогенез (онтогенез - от греч. ontos - сущее н genesis - происхождение. В биологии онтогенез - процесс индини дуального развития, филогенез (от греч. phylon - род, племя) историческое развитие мира организмов - видов, классов и т. д.).
В филогенезе процесс управления, координации действий берп свое начало в одноклеточных организмах, где сигнал об опасности или близости добычи передается контактным путем, каким является хемотаксис (от греч. chemo - химия и tachis - устройство). В биологии хемотаксис - движение простейших организмов под влиянием изменения концентрации химических раздражителей. Ответ на раздражение возможен только в непосредственной близости от раздражителя. Следующий этап эволюции - многоклеточные организмы. Механизм координации функций многоклеточной системы усложняется. На этом этапе развития регуляции каждая клетка выделяет в межклеточное пространство продукты своей жизнедеятельности, сообщая информацию о себе всей системе. Это гуморальный способ управления, структурно и функционально более дифференцированный. Заметным этапом в эволюции явилось появление продолговатых форм живых объектов. Появление этого признака было прогрессом эволюции, т. к. продолговатая форма сокращает фронт опасности для животного. Но и порождает массу проблем в управлении, т. к. части тела, находящиеся кзади от главного - головного - конца, должны быть защищены и послушны, должны быть готовы к выполнению более сложной двигательной задачи, т. е. более высоко координированы в своих действиях. Для выполнения двигательных задач этого плана эволюция порождает дистанционный способ восприятия объекта - появляется рецепторный аппарат (от лат. receptor - принимающий, receptio - принятие). В биологии рецепторы - окончания чувствительных нервных волокон или специализированные клетки - сетчатки глаза, внутреннего уха и т. д., преобразующие раздражение, воспринимаемое извне (экстероцепторы) или из внутренней среды организма (интероцепторы), в нервное возбуждение, передаваемое в центральную нервную систему. Телерецепторы (от греч. Ше - вдаль, далеко) - рецепторы, принимающие сигналы на расстоянии, - это механизм зрения, слуха и т. д. Появление телерецепторов рассматривается как скачок, революция в развитии движений, т. к. это уже способность заранее увидеть добычу или опасность, подготовиться к выполнению соответствующей двигательной задачи - обеспечить себе безопасность или овладеть жертвой. Задача усложняется, и вместе с этим усложняются управляющий и исполнительный аппараты - появляется средоточие центров управления - головной мозг, совершенствуется опорно-двигательный аппарат. Н.А.Бернштейн пишет, что загадкой эволюции явилось появление в филогенезе поперечно-полосатой мышцы. Это приобретение природы имело свои как положительные, так и отрицательные (в смысле управления) последствия. Положительным было увеличение силовых возможностей, облегчение решения сложных двигательных задач, скорости ответных реакций, устойчивости позы, выносливости при длительной работе.
Стало возможным не только туловищное передвижение, но и передвижение с помощью конечностей - ходьба, полет, плавание и т. д. Отрицательным, если можно так сказать, была необходимость усложнения систем управления и исполнительного аппарата движений - мышечной и костной систем. Структура мышцы кардинально изменяется. Мышца потому и называется поперечно-полосатой, что состоит из чередующихся, отличных друг от друга, структурных элементов, видимых микроскопически как красные и белые поперечные полоски.
Структура обусловлена функцией. Мышца с точки зрения управления работает по принципу “все или ничего”. В этих условиях дозирование усилия, адекватное решаемой двигательной задаче (фактически координация), затруднительно, и природа наделяет мышцу волокнистым строением, способностью включать в работу не все волокна, а необходимое в данный момент их количество, и “амортизаторами”, какими являются соединительно-тканные прослойки (белые полоски между красными), которые обеспечивают плавность движения. Для функции такой мышцы нужна жесткая система опоры и движений - скелет. Скелет выполняет не только двигательную, но и защитную функцию (панцирь черепахи, череп, ограждающий от повреждений нежную ткань головного мозга). Скелет должен быть жестким, но и одновременно очень подвижным, послушным, те. появляется необходимость подвижных и малоподвижных сочленений, имеющих соответствующую функции форму и определенное для каждого сустава количество степеней свободы.
Степень свободы в биомеханике - это возможность совершить движение в определенном направлении. Для блоковидной формы сустава возможны две степени свободы (например, для коленного сустава - это сгибание и разгибание).
Параллельно совершенствуются и управляющие механизмы. Все сложнее становится центральная нервная система, появляются более высокодифференцированные структуры мозга. Процесс развития мозговых управляющих структур не бессистемен, не хаотичен, а подчиняется совершенно определенным законам. В огромном, многомиллионном мире клеток мозга выстраивается в определенной последовательности и в строго определенных временных пределах своего формирования иерархия - соподчиненность низших мозговых структур высшим. Иерархия (от греч. hieros - священный, огсИё - власть) - расположение частей или элементов целого в порядке от высшего к низшему. В теории организации функций - это принцип управления.
Мы переходим к расшифровке второго положения теории Бернштейна, а именно к понятию уровней построения движений в онто- и филогенезе. Ранее кратко было описано совершенствование механизмов управляющего и исполнительного аппаратов. Из сравнения биомеханических и нейрофизиологических характеристик движений, в частности локомоций, Бернштейн заключает, что дифференцированные движения высших животных и человека есть продукт совершенствования механизмов управления более низко органиюван-
Таблица I
Фило- и онтогенез регуляции движений (по Н.А. Бернштейну)
ных систем путем создания структур, названных им уровнями построения движений.
Для расшифровки этого положения он вводит термин локализации функции. Локализация (от лат. lokus, lokalis - место, местный), по определению Бернштейна, комплекс структур мозга, ответственный за выполнение определенного класса движений. Класс движений - это движения, которые свойственны животному на определенном этапе его двигательного развития. (Далее это последнее понятие будет охарактеризовано более широко.) Он подчеркивает, что термин локализации функции не есть топика - топографическая анатомия мозга (от греч. topos - место, grapho - пишу), а функция и морфологическое содержание, вложенное в это понятие, похожи на функцию и расположение блоков панелей радиоприемника, когда отдельные части целого необязательно всегда находятся рядом, в одном и том же месте, как диктует это топографическая анатомия. Более того, созревание структур мозга, входящих в понятие локализации, может быть растянуто во времени, когда одни элементы уже готовы к выполнению функции, а другие находятся в стадии формирования. Этим, по-видимому, можно объяснить огромную сложность воспитания определенных движений, когда задержка в развитии одного из элементов локализации делает невозможным в данный момент воспитание какого-то движения - будь это игра на фортепиано, скольжение на коньках или навыки самообслуживания. Именно поэтому тренировки в спорте или обучение искусству танца и игре на музыкальных инструментах целесообразно начинать в определенном возрасте. Этим можно объяснить и сложность, огромный разброс, но и определенную закономерность патологии позы и ходьбы при ДЦП.
Различие между понятием топики и локализации иллюстрирует пример, когда при поражении определенных структур мозга больной не может выполнить задание “подними руку”, но на просьбу снять шапку достаточно легко и свободно поднимет ту же руку.
Исходя из всего вышесказанного, Бернштейн предлагает схему построения движений или уровней координации в фило- и онтогенезе.
Каждый уровень координации включает в себя афферентную систему, центр и эфферентную систему. (Афферент - от лат. afferens - приносящий, эфферент - от лат. efferens - выносящий.) В биологии, соответственно, - переносящий нервный импульс к центру или от центра к рабочему органу.
Мы собрали в таблицу сведения Бернштейна о схеме построения движения или координации (табл. I).
В схеме для каждого уровня координации обозначен морфологический субстрат центральной нервной системы, возраст окончательного его формирования, афферентная система, класс движений, организуемый этим уровнем координации, и специфические элементы позы и локомоции человека, вносимые в управление именно этим уровнем.

Уровни координации прелокомоторного периода: руброспиналь- ныц, таламо-паллидарный. стриатно-пирамидный, состоящий из двух подуровней - стриатного и пирамидного.
Далее следуют уровни регуляции движений, когда локомоция уже сформирована: теменно-премоторный (уровень предметных действий и смысловых целей) и группа высших кортикальных уровней, обеспечивающих письмо, речь и т. д., освещение которых не входит в задачу этой книги.
Руброспинальный уровень - самый древний - палеокинетиче- ский (от греч. palaios - древний, kinesis - движение) - уровень координации движений.
Название его включает латинское определение красного ядра головного мозга (nucleus - ядро, rubrum - красный) и ядер спинного мозга (от лат. spina - хребет, в анатомии - спинальный - спинномозговой).
Морфологическим субстратом его являются афференты вестибулярного аппарата, рецепторы кожи, сухожилий, мышц и суставных сумок, рецепторы перекрестных рефлексов парных конечностей и межконечностные (от лат. reflekxus - повернутый назад, отраженный, в биологии - реакция организма на раздражение рецепторов), рефлексов внутренних органов: сосудодвигательный, мочеиспускательный, дефекационный.
Он заканчивает свое развитие внутриутробно. Класс движений, обеспечиваемый этим уровнем координации, состоит из движений плавательного характера - медленные или стремительные, непрерывные или внезапно переходящие в неподвижность, движения, в которых участвует почти 100% мускулатуры тела. Их характер напоминает движения рыб.
Таламо-паллидарный уровень - это еще один механизм регуляции движений, готовый к функционированию еще до рождения. Название его обусловлено латинскими терминами: talamus - зрительный бугор, в анатомии - основная часть промежуточного мозга, главный подкорковый центр, направляющий импульсы всех видов чувствительности - температурной, болевой и т. д. - к стволу мозга, подкорковым узлам и коре больших полушарий. Pallidum (от лат. globus pallidum - бледный шар) у человека регулирует вегетативные функции. Этот уровень обеспечивает основную громадную синергию ходьбы с ритмической последовательностью включения почти 100% скелетной мускулатуры. (Синергия - от греч. sinergBs - вместе действующий. В биологии синергисты - мышцы, действующие совместно для осуществления одного определенного движения, например вдоха, в котором участвуют одновременно межреберные, межхрящевые и диафрагмальные мышцы.)
Таламо-паллидарный уровень в совокупности с руброспиналь- ным обеспечивают механизм равновесия - антигравитационный - и определенный характер движений плода в околоплодной жидкости полости матки.
Здесь следует заметить, что в работах по антропологии (от греч. antropos - человек, logos - слово, учение) есть сведения о том, что возрастная динамика трабекулярной структуры позвонков говорит о позвоночнике плода как о функционирующем органе.
Любопытным с этих позиций является открытие американских ученых, которые доказали, что плод 8 - 12 недель уже слышит. Этот интересный факт бы установлен следующим образом: отец ребенка, прижав голову к животу матери, напевал одну и ту же мелодию. После рождения малыш всегда четко реагировал на эту мелодию, затихал и прекращал плач.
Клиницисты хорошо знают, что брыкательные движения плода возникают в совершенно определенные сроки его развития настолько четко, что время шевеления является одним из критериев определения срока беременности.
Можно предположить, что у ребенка с осложненным рождением, у которого будет диагностирован детский церебральный паралич, дефектен уже самый древний механизм координации движений. В этом случае станут понятными очень многие особенности протекания беременности и родов, такие, как позднее шевеление плода, неправильное его положение (поперечное и т. п.) в полости матки, неправильное вставление головки при прохождении через родовые пути, обвитие пуповиной, один конец которой неподвижно прикреплен к стенке полости матки (так, к примеру, может погибнуть привязанный к будке маленький щенок, обвившийся цепью), быстрые или, напротив, медленные роды, преждевременные или поздние роды. Все указанные признаки достаточно часто отмечаются в анамнезе детей с ДЦП. На эту мысль наводит и то обстоятельство, что двигательные нарушения при ДЦП при всем своем многообразии классифицируются на определенные группы, в которых рисунок движений однотипен. Да и трудно предположить, что акушеры России, США, Индии и т. д. одинаково небрежны при родовспоможении.
С этих позиций родовые травмы - периферические параличи рук, переломы ключиц, гематомы и другие осложнения можно было бы рассматривать не как причину, а как следствие - следствие нарушенной программы движений плода. Исходя из этого, следовало бы, наверное, изучать с помощью ультразвукового или других методов исследования закономерности движений плода, их рисунок, и при обнаружении признаков риска предлагать кесарево сечение вместо стимуляции родовой деятельности матки, которая в данной ситуации только усилит гипоксию плода.
Афферентной системой этого уровня регуляции остаются рецепторы вестибулярного аппарата, которые призваны сигнализировать о положении частей тела в пространстве (отолитовый аппарат) и скорости и направлении движений (полукружные каналы внутреннего уха). Лабиринтная система, красное ядро, зрительный бугор, а также ядра мозжечка в норме к моменту рождения сформированы и могут полноценно функционировать.
Есть основания допустить, что осложнения периода беременности и родов могут исходить из дефектности структурных элементов руб- роспинального и таламо-паллидарного уровней построения движений, выраженной в разной степени тяжести и обусловливающей дальнейший патогенез деформаций позы и ходьбы ребенка с ДЦП после его рождения. Ребенок рождается “таламо-паллидарным”, и движения новорожденного продиктованы этим созревшим уровнем координации. На класс движений, регулируемых руброспинальным уровнем координации, наслаиваются движения класса таламо- паллидарного уровня. При этом природа не утрачивает своих ранних механизмов координации, а каждый следующий, более высоко дифференцированный уровень изменяет характеристики движения в направлении их усложнения, совершенствования в соответствии с более сложной двигательной задачей, используя при этом целесообразные элементы более примитивного класса движений.
Так, плавные, чередующиеся с неподвижностью, непрерывные движения руброспинального уровня (сходные с атетоидным гиперкинезом) переходят в область вегетативных функций, таких, как перистальтика кишечника, сокращения сосудистой стенки, работа сфинктеров мочевого пузыря и заднего прохода. Шагательная синергия таламо-паллидарного уровня координации, включающая почти всю скелетную мускулатуру, служит фундаментом организации двуногой ходьбы, вместо многоногого и туловищного передвижения низших животных (табл. I). В эволюции высших животных и человека природа использует и такие примитивные способы управления, которые свойственны одноклеточным организмам. Примером может служить передвижение кровяных телец в сосудистом русле. Исследования доказали, что это процесс не пассивного перемещения клеток в потоке плазмы крови, а активные, регулируемые движения кровяных клеток.
К классу движений таламо-паллидарного уровня относится, как следует из схемы, глобальная сгибательная синергия. Клинически это выглядит следующим образом: если попросить больного согнуть одну ногу в колене, всегда одновременно происходит автоматическое сгибание в тазобедренных, коленных и голеностопных суставах обеих ног (рис. 1 А, Б). Изолированное движение невозможно. Поставленный на колени пациент падает вперед или вообще не может принять вертикальную позу на коленях, складываясь при этом как перочинный нож, но тем не менее может сохранить вертикальное положение туловища в положении сидя с согнутыми ногами.
При тяжелой степени дефектности этого уровня человек не может самостоятельно сесть, посаженный, не удерживает позу сидя.
Прослеживая эволюцию движений ребенка, можно наблюдать, что до определенного возраста здоровый ребенок тоже не может выполнить эту задачу, но затем вместе с созреванием структур и следующего за ним по иерархической лестнице стриатного уровня двигательные синергии как бы локализуются, ограничиваются в объеме функционирующих мышц и суставов, и, таким образом, становятся возможными более дифференцированные и целесообразные позы и движения. Такая дифференцировка возможна с созреванием, как сказано выше, стриатного уровня координации, когда шагательная синергия начинает соотноситься с особенностями пространства - препятствиями, неровностями почвы, ступеньками и т. д. Стриатум - от лат. korpus striatum - полосатое тело. В анатомии - высокодиффе-


А. Больная с глобальной сгибательной синергией. Попытка произвести сгибание в правом коленном суставе сопровождается синергическим сгибанием в тазобедренном и коленном суставах, тыльным сгибанием в тазобедренном и коленном суставах, тыльным сгибанием стоп и увеличением глубины поясничного лордоза. Изолированное движение невозможно. Б. ЭМГ мышц- сгибателей левой ноги. Попытка произвести сгибание в правом (контрлатеральном) коленном суставе сопровождается высокой электрической активностью мышц-сгибателей левой ноги.
ренцированное образование головного мозга, играющее роль регулятора и тормоза грубой рефлекторной деятельности паллидума. Известно, что ребенок, только начинающий ходить, еще “не знает высоты”, не переступает через препятствия и т. д.
Глобальные, крупномасштабные двигательные синергии сменяются более локализованными. Этот процесс в норме заканчивается к 2 годам. Признаком локализации такого рода двигательной синергии является так называемая тибиальная синкинезия Штрюмпеля, описанная им в 20-х годах. Он расценивал ее как неврологический симптом, служащий дифференциальным признаком поражения пирамидного пути. Пирамидный уровень регуляции движений, по Бернштейну, является следующим за стриатным, т. е. данные Штрюмпеля косвенно подтверждают правомерность классификации уровней построения движений.
Тибиальная синкинезия Штрюмпеля клинически трактуется как автоматическое тыльное сгибание и супинация стопы с одновременным подошвенным сгибанием первого пальца этой стопы. Анализ электромиографической и биомеханической структуры ходьбы позволяет утверждать, что указанная синкинезия (от греч. sun - вместе, kinema, kinematos - движение) является элементом локомоции здорового человека и.служит для переноса стопы над опорой. Она становится отчетливо заметной только в экстремальных ситуациях: при высоком темпе ходьбы, при преодолении внезапных препятствий.
При неполноценном контроле пирамидного уровня координаций тибиальная синкинезия, не будучи ограниченной по амплитуде указанных ранее движений и времени их проявления в пределах целесообразного, становится патологической и обусловливает такие особенности позы и ходьбы при ДЦП, как нестабильность голеностопного. сустава в сагиттальной плоскости, значительное ослабление заднего толчка при ходьбе, позу так называемого тройного сгибания при стоянии.
Пирамидный уровень завершает прелокомоторный период развития координаций. Этот уровень вносит в движение его смысловое значение (пойти туда, принести то-то и т. д.). Признаком формирования этого уровня в локомоции служит возможность произвести изолированное движение.
При недостаточности пирамидного уровня координации, как указано выше, затруднено или вовсе невозможно, например, тыльное сгибание стопы. На просьбу сделать только это движение изолированное сгибание ее происходит в минимальном объеме, а при команде “согни колено” стопа автоматически сгибается иногда до прикосновения тыла стопы к поверхности голени. Аналогичная ситуация наблюдается и при электромиографическом исследовании, когда максимум амплитуды ЭМГ при автоматическом сгибании стопы при наличии тибиальной синкинезии вдвое выше максимума амплитуды ЭМГ при попытке произвести изолированное тыльное сгибание стопы (рис. 2 А, Б, В).
Пирамидный уровень координации созревает к двум годам, и с окончанием его созревания локомоция формируется в полном объе-


Рис. 2 (А,Б,В)- Больной с тибиальной синкинезией Штрюмпеля.
А. Произвольное изолированное тыльное сгибание левой стопы минимально (в пределах 10°). Б. Попытка согнуть колено левой ноги сопровождается автоматическим тыльным сгибанием стопы этой ноги. В. ЭМГ передней большеберцовой мышцы при попытке произвести максимальное тыльное сгибание стопы этой ноги (верхняя кривая). ЭМГ передней большеберцовой - мышцы значительно увеличена по амплитуде при попытке согнуть колено этой же ноги (нижняя кривая).


ме. Следовательно, схема построения движений дает нам представление о процессе поэтапной организации локомоции и для каждого уровня можно определить дифференциальный признак. Так, для та- ламо-паллидарного уровня - это глобальная сгибательная синергия, для стриатного уровня - тибиальная синкинезия Штрюмпеля, для пирамидного - произвольное изолированное тыльное сгибание стопы. Даже после того как эти уровни окончательно сформированы, локомоция не застывает в своем развитии, элементы ее претерпевают изменения, вызванные гормональными возмущениями периода юности или ветхостью, изношенностью механизмов координации в старости, а также повреждениями, вносимыми в мозг травмой или болезнью. В этом смысле патология позы и ходьбы при ДЦП может быть трактована как результат процесса развития изначально дефектных структур мозга, отвечающих за координацию на каждом этапе онтогенеза локомоции.
Следующий постулат Бернштейна - принцип рефлекторного кольца, или иначе - обратной связи, или так называемых сенсорных коррекций (сенсорный - от лат. sensus - восприятие, чувство, ощущение). Эти формулировки определяют одно и то же понятие.
Бернштейн впервые вводит в нейрофизиологию понятие рефлекторного кольца как формы обратной связи, вступив в драматическую для себя дискуссию с великим Павловым, строившим свою теорию организации и совершенствования функции на понятии рефлекторной дуги, исключая таким образом обратную связь.
Движение представляет собой, по Бернштейну, два цикла взаимодействий: периферического и центрального (рйс. 3).
Периферический двигательный аппарат осуществляет свою деятельность путем сложного взаимодействия с внешней средой. Мера мышечного напряжения зависит как от иннервационного состояния мышцы, так и от значения сочленовного угла, т.ё. от мгновенного положения, занимаемого системой звеньев. Отсюда следует, что мышечное напряжение есть одна из причин движения, т. к. оно есть сила, которая приложена к звену и вынуждает его изменить свое положение. С другой стороны, движение звеньев, сопровождающееся изменением сочленовных углов, изменяет расстояние между точками прикрепления мышц и тем самым является причиной изменения ее напряжения. Здесь имеется характерная для физиологии цйклическая форма взаимодействия: мышечные напряжения влияют на протекание движения, а движения влияют на мышечное напряжение. Такие циклические взаимодействия хорошо известны в механике и имеют выражение на математическом языке. Над периферической системой циклических взаимодействий надстроена другая, деятельность которой также циклична.
Это ЦНС со всеми ее многочисленными аппаратами. Здесь имеют taecTO взаимодействия другого порядка. Прежде всего первичный эффекторный импульс из командного прибора, направленный из ЦНС через клетки передних рогов в мышечную систему, приводит последнюю в движение или изменяет состояние ее движения. Это движение или изменение движения воспринимаются нервными окон-

чаниями сухожилий, мышц и суставных сумок, которые относятся к проприоцептивным нервным аппаратам. Они через аффекторные пути передают информацию об изменениях движения. Учитывая эту импульсацию, а также зрительную, слуховую, ЦНС посылает новый импульс, внося коррективы в первоначальный двигательный импульс, т. е. имеет место циклический характер взаимодействий, что говорит о рефлекторном кольце, о наличии обратной связи или о сенсорной коррекции.
Пассивный двигательный аппарат состоит из подвижных костных звеньев, образующих кинематические цепи, которые характеризуются степенями свободы подвижности.
Переход от одной степени свободы к двум или нескольким знаменует собой возникновение необходимости выбора. Становится необходимым автоматический непрерывный целесообразный выбор.
Кинематическая цепь станет управляемой только в том случае, если в состоянии назначить определенные, желательные для нас траектории движения для каждого из элементов цепи и заставить эти элементы двигаться по назначенному пути.
“В преодолении избыточных степеней свободы движущегося органа, т. е. в превращении последнего в управляемую систему, и заключается задача координации движений”. Принцип координации Бернштейн называет принципом сенсорных коррекций.
Сказанное вполне объясняет, почему расстройства в эффектор- ных аппаратах ЦНС, как правило, не влекут за собой чистых нарушений координации, давая только синдромы параличей, парезов, контрактур и т. п., и почему обязательно неполадки в афферентных системах вызывают нарушения движений атактического типа, т. е. расстройства координации.
Все известные в клинике формы органических расстройств координации всегда связаны с заболеваниями рецепторных аппаратов и их проводящих путей: вестибулярных аппаратов (лабиринтная или вестибулярная атаксия), задних столбов спинного мозга, проводящих проприоцептивную и тактильную импульсации (табетическая атаксия), реципрокных систем мозжечка (церебеллярная атаксия).
У человека возможны компенсации, способные преодолеть в той или иной мере органическую атаксию. Они всегда осуществляются путем включения в двигательный процесс нового вида чувствительности (зрительной, слуховой и др.).
Все виды афферентаций организма принимают в разных случаях и в разной степени участие в осуществлении сенсорных коррекций.
Используя терминологию Sherrington, Бернштейн называет всю совокупность рецепторных отправлений этого рода “проприоцеп- тикон” в широком функциональном смысле.
Это система сенсорных сигналов о позах, сочленовных углах, скоростях, мышечных растяжениях и напряжениях. Мышца, вызывая своей деятельностью изменения в движении кинематической цепи, раздражает чувствительные окончания проприоцепторов, а эти сигналы, замыкаясь в ЦНС на эффекторные пути, вносят изменения в эффекторный поток (т.е. имеется кольцо рефлекса). Координация в зтом понимании - не какая-нибудь точность или тонкость эффекторных импульсов, а особая группа физиологических механизмов, создающих непрерывное организованное циклическое взаимодействие между аффекторным и эффекторным процессом.
Так как каждое движение, имеющее реальный смысл, преодолевает на своем пути внутренние и внешние силы, вся суть его заключается в целесообразной борьбе с ними.
Двигательная задача и те силы, которые надо преодолеть для ее решения, диктуются внешним миром и неподвластны индивидууму.
Для того чтобы правильно решить двигательную задачу, необходимо в течение всего двигательного акта, от начала и до конца выверять его с помощью органов чувств, следить и контролировать каждое мгновение: так ли, как нужно, идет решение задачи, и каждое мгновение вносить необходимые поправки. Механизм этих поправок к движению и является сенсорной коррекцией. Дефект тех или иных нужнейших для движения видов чувствительности и обеспечиваемых ими сенсорных коррекций ведет к тяжелым нарушениям двигательной координации.
Движение не может совершаться по одним лишь внутренним законам баланса возбуждений и торможений, потому что с первого же мгновения его нарушат и внешние силы, неизвестные организму наперед и неподвластные ему, и силы взаимных столкновений и отдачи в длинных и подвижных цепях конечностей, и сопротивление внешней среды.
Роль и деятельность чувствительных афферентных систем организма только и начинается с момента подачи ими пускового сигнала очередного движения. Как только оно началось, в ответ на эффек- торные первые импульсы во всех чувствительных приборах двигательного аппарата (в органах мышечно-суставной чувствительности в первую очередь) возникают афферентные импульсы, сигнализирующие о том, как началось движение и как оно протекало. Эти проверочные чувственные сигналы определяют в мозге необходимые очередные сенсорные коррекции.
Исходя из этого, фундаментальной формой нервного процесса при осуществлении смыслового двигательного акта является, по Бернштейну, форма рефлекторного кольца.
При выполнении двигательной задачи чувствительные системы обеспечивают две различные функции: сигнально-пусковую службу и службу, контролирующую эффект движения и обеспечивающую его управляемость.
Изучение управления целостными смысловыми двигательными актами представило афферентные системы организма в совершенно другом свете. Анализ координационного построения двигательного акта и его нарушений в патологии, изучение того, как ведется управление движениями в порядке кругового процесса типа “рефлекторного кольца” показали, что афферентные системы сигнализируют мозгу о ходе движения и обеспечивают основу для сенсорных коррекций не “сырыми чувственными сигналами, обособленными друг от друга по признаку качества (отдельно осязательными, кинестетическими, зрительными и т. д.), а наоборот. Эти восприятия, обеспечивающие управление движением, всегда имеют характер целых сложных синтезов, глубоко проработанных мозгом комплексов разнообразнейших ощущений, скрепленных еще и многочисленными следами от прежних ощущений, сохраненных памятью, впечатлений от прежних перемещений в пространстве. “Чем сложнее двигательная задача, тем сложнее и дальше от первичных сырых ощущений тот сенсорный (чувственный) синтез, который обслуживает данный уровень, тем больше в нем внутренней мозговой переработки, осмысления, упорядочения и даже схематизации первичных ощущений, которые в нем обобщаются”.
Все последовательное эволюционное усложнение и обогащение сенсорных синтезов шло по линии устранения искажений и неточностей отдельных органов чувств, обеспечения сверки их показаний, осмысления.
Все последовательно формировавшиеся уровни построения движений (так их обозначает и современная физиология двигательных актов) имеют самый различный эволюционный возраст, сохранились и у человека, образовав у него целую иерархическую лестницу взаимного подчинения, причем самый верхний из них принадлежит монопольно человеку (уровень речи и письма). Древнейшие низовые уровни, сформированные у животных со своими мозговыми субстратами и списками посильных им двигательных задач, сохранились и у человека и продолжают управлять древнейшими, примитивными в смысловом отношении двигательными актами (глотание, плавание, ходьба и т. д.).
“В начале формирования нового индивидуального двигательного навыка почти все коррекции суррогатно ведутся ведущим уровнем - инициатором, но вскоре положение изменяется, каждая из технических сторон и деталей выполняемого сложного движения рано или поздно находит для себя среди нижележащих уровней такой, афферентации которого наиболее адекватны этой детали по качествам обеспечиваемых им сенсорных коррекций. Постепенно, в результате ряда последовательных переключений и скачков, образуется сложная многоуровневая постройка, возглавляемая ведущим уровнем, адекватным смысловой структуре двигательного акта и реализующим только самые основные решающие в смысловом отношении коррекции. “Под его дирижированием в выполнении движений участвуют, далее, ряд фоновых уровней, которые обслуживают фоновые или технические компоненты движения, тонус, иннервацию и денервацию, реципрокное торможение, сложные синергии и т. п.” (Н.А.Бернштейн).
Процесс переключения технических компонентов управления движением в низовые, фоновые, уровни есть то, что называется обычно автоматизацией движения.
Во всяком движении, какова бы ни была его уровневая высота, осознается один только ведущий уровень.
Сущность процесса автоматизации, требующего иногда длительного времени и настойчивого упражнения, состоит именно в выработке ЦНС плана описанной выше разверстки фонов, в определении двигательного состава движения.
Определение двигательного состава неврологи называют иногда “составлением проекта движения”.
Первоначально для удержания стойкой длины шага ребенок использует проприоцептивные механизмы и вносит коррекцию “post factum”, затем вступает более совершенный прием коррекции “ante factum" (от лат. post и ante - соответственно после и перед фактом).
Явление предварительных коррекций служит во всех случаях более поздней и более совершенной формой координации по сравнению с механизмом вторичных коррекций.
В начале освоения движения новичок напрягает все мышцы- антагонисты, заранее и с запасом выводит из строя все степени свободы, оставляя одну-две самые необходимые для данной базы движения.
На следующей ступени упражнения, уже освоившись с ним, когда и в каком направлении постигнет его очередной толчок реактивной силы, субъект позволяет себе постепенно, одну за другой высвобождать фиксированные до того степени свободы, чтобы предотвращать реактивные силы, что дает резкую энергетическую экономию, т. е. борется с реактивными силами. В третьей ступени развития движения борьба с реактивными силами носит другой характер, когда они из помех превращаются в полезные силы.
Сенсорные коррекции являются стимулом как в процессе становления движений, так и в процессе их дальнейшего совершенствования в возрастном аспекте. Причем процесс организации движения внутри своего класса Бернштейн определяет как эволюционный, а переход к новому классу движений, обусловленный появлением более дифференцированного уровня координации как революционный, скачкообразный. Движения более высокого уровня регуляции появляются внутри класса более низко организованного, достигают максимума развития и вытесняются нерациональные с точки зрения новой двигательной задачи признаки прежних движений.
К примеру, двигательные автоматизмы глобальной сгибательной синергии постепенно сменяются более локализованными автоматизмами тибиальной синкинезии. При этом изменяются биомеханические и электрофизиологические характеристики ходьбы, позволяющие выполнять более сложные двигательные задачи, такие, как дифференцировка фаз опорного периода шага, способность преодолевать неровности почвы, более высокий темп ходьбы и т. д.
В конечном итоге именно сенсорные коррекции решают эти проблемы. Ведь исполнительный мышечный аппарат, вся работа мышц управляется импульсами, идущими от клеток передних рогов спинного мозга, по принципу: импульс - сокращение мышцы. Все координационные “разборки” (с какой силой сократиться мышце, когда, как долго и т. д.) происходят на супраспинальных уровнях - на уровнях координации, обозначенных Бернштейном, т. е. до клеток передних рогов спинного мозга. Таким образом, “конечный путь” по неврологической терминологии, один при всем многообразии и сложности надсегментарного аппарата ЦНС.
Поза, характеристики ходьбы, следовательно, формируются на надсегментарных уровнях, и инструментом этого процесса являются сенсорные коррекции.
Этот принцип очень важен в том смысле, что при ДЦП, т. е. при центральном параличе, неправомерно, по-видимому, говорить о потере мышечной силы, как о причине ограничения объема движений в суставе (это свойственно только параличам периферическим, где прерван или поврежден конечный - эфферентный - путь), а следует говорить о нарушении координации движений - дискоординации, дискинезии (от греч. dys... и лат. dis... - приставка, означающая затруднение, нарушение, утрату чего-то). С этих позиций логично рассматривать и сущность способов ортопедической коррекции позы и ходьбы при ДЦП.
Все средства, применяемые ортопедией, имеют своей целью в итоге повлиять на характер сенсорных коррекций, будь это уменьшение потока сенсорной импульсации при фиксации сустава лонгетой или ортопедическим аппаратом или применение холода для усиления потока импульсации. Последнее достигается, например, методом Мишеля ля Матье, когда при сгибательной контрактуре лучезапястного сустава и суставов пальцев дальнейшее довольно сильное и продолжительное сгибание, производимое врачом и усиливающее афферентный поток, вызывает увеличение объема разгибательных движений. Ту же роль выполняет и так называемый лечебно-нагрузочный костюм - костюм космонавтов, предложенный к применению при ДЦП. С помощью продольных эластичных тяг, идущих от надплечий к поясу и от пояса к стопам, усиливается сенсорная импульсация в координационные структуры мозга, ответственные за регуляцию антигравитационных функций. И действительно, при применении костюма мы наблюдали значительное повышение устойчивости позы и ходьбы детей с ДЦП. Хотя следует заметить, что в данном случае нельзя исключить и нецелесообразные биомеханические компенсации для повышения устойчивости позы, такие, как изменение глубины кривизн позвоночника, усиление имитационных синкинезий и т. д.
Хирургическое вмешательство также значительно влияет на поток сенсорной импульсации: мио- и тенотомии (от греч. mfs - мышца, tome - отрезок, tendo - от лат. - сухожилие; в медицине - рассечение мышц и сухожилий), артродезы (от греч. arthron - сустав, de - от лат. и des - от франц. - отсутствие) исключают движения в суставах и практически прекращают поток проприоцептивных импульсов. Это объясняет спазмолитический эффект операций при ДЦП, распространяющийся далеко за пределы области вмешательства. Иногда одно рассечение прямых мышц бедра при rectus- синдроме нормализует всю позу.
Пересадка мышц также меняет афферентный поток, внедряясь таким образом в механизм сенсорных коррекций. Это положение заставляет строже подходить к показаниям к хирургическим операциям в возрастном аспекте. Глобальная синергия, например, делает эффект любой операции труднопрогнозируемым, также, как сочетание экви- нуса с тибиальной синкинезией.
Наиболее благоприятным бывает результат у больных ДЦП с недостаточностью пирамидного уровня регуляции, т. е. когда прелоко- моторный период в основном закончил свое формирование и практически не прогнозируем результат “таламо-паллидарных больных” ДЦП, т. к. период формирования локомоции только начал свое развитие.
Об этих и других осложнениях будет сообщено подробнее в главе о принципах хирургической коррекции позы и ходьбы при ДЦП.
Сенсорные коррекции являются основой не только организации движений в онтогенезе, но и механизмом их совершенствования, о чем свидетельствует теория воспитания навыка в спорте, труде, а также организация локомоций. Н.А.Бернштейн в своей теории освещает основные структурные слагающие локомоторного акта: чередование опорного и переносного периодов, период двойной опоры.
По принципу равенства действия и противодействия усилия ног равны и противоположны усилиям опорных реакций, т. е. силовым воздействиям опорной поверхности на тело идущего. Это вертикальная составляющая шага (см. гл. IV).
Наиболее информативна продольная составляющая.
Силовые импульсы, обусловливающие движения ноги при ходьбе, отнюдь не ограничиваются одной парой простых реципрокных импульсов на каждый двойной шаг.
При изучении развития бега у детей обнаружено, что в норме у детей от 2 до 5 лет начинается организация переносного периода и наибольшие новшества появляются в проксимальных точках ноги, тогда как дистальные еще долго остаются стабильными.
От 2 до 5 лет продольные кривые бедра обнаруживают беговую перестройку переносного времени уже в полном объеме, тогда как кривые стопы еще не отдифференцировались от ходьбы даже в опорном периоде.
Этот преобладающий ход эволюции сверху вниз от проксимальных точек к дистальным приводит Н.А.Бернштейна к следующему физиологическому обобщению. (Т.к. эти сведения чрезвычайно важны для ортопеда, особенно хирурга, занимающегося коррекцией позы и ходьбы при ДЦП, представляется целесообразным привести весь текст автора.) “Крайне маловероятно, чтобы нервная динамика дистальной мускулатуры отставала так резко (на целые годы) от динамики проксимальных мышц. Значительно вероятнее другое. Проксимальные точки ноги (например, тазобедренный сустав) окружены значительно более мощным массивом мышц, нежели дистальные (стопа), и в то же время моменты инерции ближайших к первым частей звена несомненно меньше, чем моменты инерции дистальных звеньев. Поэтому мышцам тазобедренной группы гораздо легче сдвинуть с места верхние отрезки бедра, чем стопу, для смещения которой им приходится привести в движение всю инертную ногу сверху донизу. С этим же связано еще и то, что (относительные) скорости дистальных звеньев, как правило, выше, чем проксимальные. Следовательно, и кинетические энергии у первых больше и преодолеть их труднее. Дистальные звенья играют по отношению ко всей ноге роль, напоминающую роль тяжелого маятника”.
Отсюда следует, что нервному эффекторному импульсу при данной его силе несравненно легче проскочить в проксимальную кривую и отразиться в ней в виде заметной динамической волны, нежели суметь пробить всю толщу инерционного сопротивления дистальной системы. Для того чтобы ощутиться в последней, эффекторный импульс должен обладать значительной силой или же попасть “вовремя” - в такой момент, когда дистальная система находится в особенно выгодных условиях для его восприятия.
В чем может выражаться этот благоприятный момент, еще сказать трудно, и здесь, видимо, открывается большое поле для исследования: может быть, здесь имеет значение просто выгодная поза конечности, обеспечивающая мышцам наибольшую биомеханическую эффективность действия, может быть, этот благоприятный момент есть переломный момент скорости, когда инерционные сопротивления всего слабее ощутимы, может быть, наконец, это есть момент особо восприимчивой настройки мышечного аппарата, создаваемой здесь тем или иным стечением проприоцептивных сигналов.
Так или иначе, управление дистальными звеньями требует большей ловкости, более высокой координационной техники в смысле умения улучшить подходящий, оптимальный момент, дать как раз нужный импульс как раз в нужное время. Если это время упустить хотя бы на долю секунды, то импульс уже “не пройдет”, т. е. не даст никакого заметного эффекта на периферии.
Надо отметить, что речь здесь идет не о мелких координированных движениях дистальных отрезков вроде движений пальцев, а именно о глобальных, обширных, экстрапирамидного типа смещениях дистальных отрезков конечности. Динамика этих последних в конечном счете зависит от тех же самых тазобедренных мышц, что и динамика проксимальных точек ноги.
Но дистальная динамика становится богато расчлененной на биодинамические детали не тогда, когда эти детали появляются в эффекторном импульсе и начинают отражаться в динамике податливых проксимальных точек, а только тогда, когда устанавливается функциональная сонастроенность эффекторики и рецеп- торики и когда эффекторная н.с. научается улавливать мимолетные моменты функциональной проводимости. Динамическая расчлененность сопровождается особенно большим богатством силовых “переливов” в дистальных звеньях, свидетельствующим об очень тонком управлении динамикой внешнего, биомеханического порядка.
В сложном многозвенном маятнике, каким в биомеханическом смысле является нога, динамическое взаимодействие звеньев, игра реактивных сил, сложные колебательные цепочки и т. д. очень разнообразны и обильны. И то, что они не стушевываются у тренированного мастера, а в таком изобилии находят свое отражение в динамических кривых, говорит об очень тонкой реактивной приспособляемости нервно-двигательного аппарата к проприоцептивной сигнализации.
Более высокая степень расчлененности дистальных силовых кривых есть признак умения ловить моменты наименьшего сопротивления, иначе говоря, наиболее полно утилизировать и всю внешнюю богатую игру сил и, возможно, всю физиологическую (непроизвольную) гамму реципрокных и иных, более сложных реактивных процессов на мышечной периферии”.
Этот относительно сложный для клинициста материал цитирован для того, чтобы акцентировать, что хирургический экстремизм в вопросах пересадок и удлинения мышц, управляющих движениями в суставах стоп у детей с ДЦП, вряд ли правомерен до тех пор, пока стереотип ходьбы не сформируется окончательно. Следует отметить при этом, что двигательное развитие ребенка с ДЦП почти всегда отстает на 2 - 3 года^Если учесть сведения Бернштейна, ходьба и бег в норме созревают к 5 годам.
Далее автор констатирует наличие трех ступеней инволюции ходьбы в возрастном аспекте.
1. Снижение функции структурных механизмов ходьбы, но больший контроль сознания.
2. Настороженная сознательность сменяется суетливостью, мелкими шаговыми движениями.
3. Явный распад двигательных структур.
Отмечается расщепление ранее единой координации.
Таким образом, онтогенетический материал показал с несомненностью, что динамическая структура ходьбы возникает, проходит через ряд закономерных стадий развития и столь же закономерно инволюционирует в старости.
Принципиально наиболее важно здесь то, что это развитие связано с очень отчетливыми качественными сдвигами в самой структуре ходьбы.
В отношении морфологии эта структура проходит в раннем онтогенезе через:
а) стадию реципрокного иннервационного примитива;
б) стадию постепенного развития морфологических элементов;
в) стадию избыточной пролиферации этих элементов;
г) стадию обратного развития инфантильных элементов и окончательной организации целостной и соразмерной формы.
“В отношении двигательной координации биодинамическая структура ходьбы также проходит через ряд качественно различных этапов развития: в самом начале отмечается симптом гипофункции проприоцептивной координации вообще, затем следует стадия выработки проприоцептивной координации post factum (компенсаторной или вторичной координации).
Гораздо реже развивается координация ante factum (дозировочная или первичная координация), организующаяся значительно позднее”.
Итак, теория Бернштейна о построении движений дает представление о нейрофизиологической и биомеханической структуре движения в процессе его становления и совершенствования. Она включает основополагающие положения:
1. Онтогенез движений человека повторяет филогенез, что позволяет говорить об универсальности схемы построения движений, предложенной автором, и, следовательно, правомерности применения этих законов к различным нарушениям в двигательной сфере человека, в том числе и к ДЦП.
2. Уровень координации морфологически строго обозначен и включает в себя определенные структуры головного мозга, афферентную и эфферентную рецепторные системы, способные осуществлять регуляцию специфических классов движений.
3. Качества движений не наследуются, а приобретаются. Совершенствование качеств движения есть процесс, состоящий из этапов созревания структур мозга, координирующих определенные, специфические для этого уровня классы движений. Процесс этот имеет ступенчатый характер. Совокупность комплекса мозговых структур координации и специфического для него класса движений Бернштейн называет уровнем построения движений. Для каждого класса движений нами определен признак - индикатор, специфический для этого класса движений.
Для таламо-паллидарного уровня - это глобальная сгибательная синергия, для стриатного - тибиальная синкинезия Штрюмпеля, для пирамидного - способность произвести произвольное изолированное тыльное сгибание стопы, изолированное движение пальцев рук.
4. В онтогенетическом развитии природа использует все приобретенные ранее механизмы координации от примитивных, переходящих у человека в сферу вегетатики, до БЫСШИХ социальных действий. Из каждого класса движений природа в онтогенезе использует целесообразные для выполнения двигательной задачи элементы путем торможения движений, не нужных для новой, более сложной координатор- ной задачи. Эту функцию выполняет следующий, более высокоорганизованный уровень координации.
5. Основой координации являются механизм сенсорной коррекции, два цикла взаимодействия и механизм развития навыка.
6. Сравнительный анализ качественных характеристик движений в процессе их онтогенеза в норме и клинических симптомоком- плексов расстройств позы и ходьбы при ДЦП позволяет провести отчетливые параллели. Исходя из этого, есть основание полагать, что ДЦП - не болезнь с резидуальной стадией, а результат созревания изначально дефектного мозга, проявляющий себя уже внутриутробно. Сходство движений определенного класса и симптоматики расстройств движений при ДЦП позволяет классифицировать патологию позы и ходьбы при ДЦП по дефектному уровню координации, при этом учитывается достаточная условность этой схемы.
7. Ребенок в норме рождается “таламо-паллидарным”. В течение первых двух лет он проходит еще две стадии прелокомоторного периода развития координаторных механизмов - стрйатную и пирамидную. У детей с ДЦП пирамидный уровень не достигает своей полноценной зрелости. Чем с большим опозданием и с большей дефектностью проходит у данного больного созревание структур мозга, отвечающих за координацию двигательных функций, тем сложнее прогнозировать результат лечения и тем осторожнее, по-видимому, следует подходить к назначению радикальных, в частности хирургических, методов лечения.
8.,Прелокомоторный период заканчивает свое развитие к 2 годам в норме. Это означает, что все элементы, необходимые Для удержания устойчивой вертикальной позы и ходьбы, есть в наличии. И тем не менее Бернштейн указывает, что такие составные части локомоции, как фазы опоры, элементы бега, заканчивают свое развитие к 3 годам, а все составляющие нормальной локомоции - к 5 годам. Дети с ДЦП значительно отстают в развитии двигательных навыков - на 2 и 3 года. В связи с этим следует заметить, что прогноз любого хирургического вмешательства у детей в возрасте ранее 6 - 7 лет затруднителен и не всегда результат совпадает с желаемым.
Теория уровней построения движений .
Специально исследуя этот вопрос на очень обширном материале Н.А. Бернштейн обнаружил следующее. В зависимости от того, какую информацию несут сигналы обратной связи: сообщают ли они о степени напряжения мышц, об относительном положении частей тела, о скорости или ускорении движения, рабочей точки, о ее пространственном положении, о предметном результате движения, афферентные сигналы приходят в разные чувствительные центры головного мозга и соответственно переключаются на моторные пути на разных уровнях. Причем под уровнями следует понимать буквально морфологические "слои" в ЦНС. Так были выделены уровни спинного и продолговатого мозга, уровень подкорковых центров, уровни коры.
Остановимся лишь на краткой характеристике каждого из уровней, выделенных Н.А. Бернштейном, и проиллюстрируем их на примерах.
Надо сказать, что каждый уровень имеет специфические, свойственные только ему моторные проявления; каждому уровню соответствует свой класс движений.
Уровень А - самый низкий и филогенетически самый древний. У человека он не имеет самостоятельного значения, зато заведует очень важным аспектом любого движения - тонусом мышц. Он участвует в организации любого движения совместно с другими уровнями.
Правда, есть немногочисленные движения, которые регулируются уровнем А самостоятельно: это непроизвольная дрожь, стук зубами от холода и страха, быстрые вибрато (7-8 гц) в фортепианной игре, дрожания пальца скрипача, удержание позы в полетной фазе прыжка и др.
На этот уровень поступают сигналы от мышечных проприорецепторов, которые сообщают о степени напряжения мышц, а также от органов равновесия.
Уровень B . Бернштейн называет его уровнем синергий. На этом уровне перерабатываются в основном сигналы от мышечно-суставных рецепторов, которые сообщают о взаимном положении и движении частей тела. Этот уровень, таким образом, оторван от внешнего пространства, но зато очень хорошо "осведомлен" о том, что делается "в пространстве тела".
Уровень B принимает большое участие в организации движений более высоких уровней, и там он берет на себя задачу внутренней координации сложных двигательных ансамблей. К собственным движениям этого уровня относятся такие, которые не требуют учета внешнего пространства: вольная гимнастика; потягивания, мимика и др.
Уровень C . Бернштейн называет его уровнем пространственного поля. На него поступают сигналы от зрения, слуха, осязания, т.е. вся информация о внешнем пространстве. Поэтому на нем строятся движения, приспособленные к пространственным свойствам объектов - к их форме, положению, длине, весу и пр. Среди них все переместительные движения: ходьба, лазанье, бег, прыжки, различные акробатические движения; упражнения на гимнастических снарядах; движения рук пианиста или машинистки; баллистические движения - метание гранаты, броски мяча, игра в теннис и городки; движения прицеливания - игра на бильярде, наводка подзорной трубы, стрельба из винтовки; броски вратаря на мяч и др.
Уровень D назван уровнем предметных действий. Это корковый уровень, который заведует организацией действий с предметами. Он практически монопольно принадлежит человеку. К нему относятся все орудийные действия, манипуляции с предметами и др. Примерами могут служить движения жонглера, фехтовальщика; все бытовые движения: шнуровка ботинок, завязывание галстука, чистка картошки; работа гравера, хирурга, часовщика; управление автомобилем и т.п.
Характерная особенность движений этого уровня состоит в том, что они сообразуются с логикой предмета. Это уже не столько движения, сколько действия; в них совсем не фиксирован двигательный состав, или "узор" движения, а задан лишь конечный предметный результат. Для этого уровня безразличен способ выполнения действия, набор двигательных операций. Так, именно средствами данного уровня Н. Паганини мог играть на одной струне, когда у него лопались остальные. Более распространенный бытовой пример - разные способы открывания бутылки: вы можете прибегнуть к помощи штопора, ножа, выбить пробку ударом по дну, протолкнуть ее внутрь и т.п. Во всех случаях конкретные движения будут разные, но конечный результат действия - одинаковый. И в этом смысле к работе уровня D очень подходит пословица: "Не мытьем, так катаньем".
Наконец, последний, самый высокий -уровень Е . Это уровень интеллектуальных двигательных актов, в первую очередь речевых движений, движений письма, а также движения символической, или кодированной, речи - жестов глухонемых, азбуки Морзе и др. Движения этого уровня определяются не предметным, а отвлеченным, вербальным смыслом.
Теперь сделаюдва важных замечания относительно функционирования уровней .
Первое: в организации сложных движений участвуют, как правило, сразу несколько уровней - тот, на котором строится данное движение (он называется ведущим), и все нижележащие уровни.
К примеру, письмо - это сложное движение, в котором участвуют все пять уровней. Проследим их, двигаясь снизу вверх.
Уровень А обеспечивает прежде всего тонус руки и пальцев.
Уровень B придает движениям письма плавную округлость, обеспечивая скоропись. Если переложить пишущую ручку в левую руку, то округлость и плавность движений исчезает: дело в том, что уровень B отличается фиксацией "штампов", которые выработались в результате тренировки и которые не переносятся на другие двигательные органы (интересно, что при потере плавности индивидуальные особенности почерка сохраняются и в левой руке, потому что они зависят от других, более высоких уровней). Так что этим способом можно вычленить вклад уровня B.
Уровень D обеспечивает правильное владение ручкой, наконец, уровень Е - смысловую сторону письма.
Развивая это положение о совместном функционировании уровней, Н.А. Бернштейн приходит к следующему важному правилу: в сознании человека представлены только те компоненты движения, которые строятся на ведущем уровне; работа нижележащих, или "фоновых", уровней, как правило, не осознается.
Когда субъект излагает на бумаге свои мысли, то он осознает смысл письма: ведущим уровнем, на котором строятся его графические движения, в этом случае является уровень Е. Что касается особенностей почерка, формы отдельных букв, прямолинейности строк и т.п., то все это в его сознании практически не присутствует
Второе замечание: формально одно и то же движение может строиться на разных ведущих уровнях.
Проиллюстрирую это следующим примером, заимствуя его у Н.А. Бернштейна. Возьмем круговое движение руки; оно может быть получено на уровне А : например, при фортепианном вибрато кисть руки и суставы пальцев описывают маленькие круговые траектории. Круговое движение можно построить и на уровне B , например включив его в качестве элемента в вольную гимнастику.
На уровне С будет строиться круговое движение при обведении контура заданного круга. На уровне предметного действия D круговое движение может возникнуть при завязывании узла. Наконец, на уровне Е такое же движение организуется, например, при изображении лектором окружности на доске. Лектор не заботится, как заботился бы учитель рисования, о том, чтобы окружность была метрически правильной, для него достаточно воспроизведения смысловой схемы.
А теперь возникает вопрос: чем же определяется факт построения движения на том или другом уровне? Ответом будет очень важный вывод Н.А. Бернштейна, который дан выше: ведущий уровень построения движения определяется смыслом, или задачей, движения.
Яркая иллюстрация этого положения содержится в исследованииА.Н. Леонтьева иА.В. Запорожца . Работая в годы Великой Отечественной войны над восстановлением движений руки раненых бойцов, авторы обнаружили следующий замечательный факт.
После периода лечебных упражнений с раненым проводилась проба для выяснения того, насколько функция руки восстановилась. Для этого ему давалась задача "поднять руку как можно выше". Выполняя ее, он поднимал руку только до определенного предела - диапазон движений был сильно ограничен. Но задача менялась: больного просили "поднять руку до указанной отметки на стене" и оказывалось, что он в состоянии поднять руку на 10-15 см выше. Наконец, снова менялась задача: предлагалось "снять шляпу с крючка" - и рука поднималась еще выше!
В чем здесь дело? Дело в том, что во всех перечисленных случаях движение строилось на разных уровнях: первое движение ("как можно выше") - в координатах тела, т.е. на уровне B ; второе ("до этой отметки") - на уровне C , т.е. в координатах внешнего пространства; наконец, третье ("снимите шляпу") - на уровне D . Проявлялась смена уровней в том, что движение приобретало новые характеристики, в частности осуществлялось со все большей амплитудой.
Введение………………………………………………………………..2
1. Психофизиологическая основа организации движений……...3
1.1. Принцип сенсорных коррекций…………………………….4
1.2. Схема рефлекторного кольца………………………………6
1.3. Уровни построения движений……………………………..7
2. Формирование двигательных навыков……………………….10
2.1. Структура двигательных навыков ………...……………10
2.2. Природа навыка и тренировки. ………………………….12
З. Уровневый подход при анализе механизмов психической деятельности……………………………………………………..…..15
3.1.Внимание и деятельность…………………………………15
3.2.Восприятие…………………..………………………………20
Заключение…………………………………………………………..26
Список литературы…………………………………………………27
Введение.
Существующее в настоящее время в психологии представление о физиологии движений были сформулировано и экспериментально обосновано выдающимся российским ученым Н. А. Бернштейном.
Врач-невропатолог по образованию, физиолог по своим научным интересам, Н. А. Бернштейн выступал в научной литературе как страстный защитник принципа активности - одного из тех принципов, на которых строится психологическая теория деятельности. В 1947 г. вышла одна из основных книг Бернштейна «О построении движений», которая была удостоена Государственной премии. В этой книге был высказан ряд совершенно новых идей. Одна из них состояла в опровержении принципа рефлекторной дуги как механизма организации движений и замене его принципом рефлекторного кольца.
Цель данной работы является анализ основных аспектов теории построения движений Н. А. Берштейна.
Объект изучения-закономерности организации движения.
Задачи работы:
1) Описать психофизиологическую основу организации движений;
2) Рассмотреть механизмы формирования навыков;
3) Выделить основные механизмы психической деятельности, такие как: внимание и восприятие.
1. Психофизиологическая основа организации движений.
В трудах Н. А. Бернштейна нашла блестящую разработку проблема механизмов организации движений и действий человека. Занимаясь этой проблемой, Н. А. Бернштейн обнаружил себя как очень психологично мыслящий физиолог, в результате его теория и выявленные им механизмы оказались органически сочетающимися с теорией деятельности; они позволили углубить наши представления об операционально-технических аспектах деятельности.
Н. А. Бернштейн выступил в научной литературе как страстный защитник принципа активности - одного из тех принципов, на которых покоится психологическая теория деятельности.
В 1947 г. вышла одна из основных книг Н. А. Бернштейна "О построении движения", которая была удостоена Государственной премии. В этой книге были отражены итоги почти тридцатилетней работы автора и его сотрудников в области экспериментальных, клинических и теоретических исследований движений и высказан ряд совершенно новых идей.
Одна из них состояла в опровержении принципа рефлекторной дуги как механизма организации движений и замене его принципом рефлекторного кольца. Этот пункт концепции H.A. Бернштейна содержал, таким образом, критику господствовавшей в то время в физиологии высшей нервной деятельности точки зрения на механизм условного рефлекса как на универсальный принцип анализа высшей нервной деятельности .
Объектом изучения Н. А. Бернштейн сделал естественные движения нормального, неповрежденного организма, и, в основном, движения человека. Таким образом, сразу определился контингент движений, которыми он занимался; это были движения трудовые, спортивные, бытовые и др. Конечно, потребовалась разработка специальных методов регистрации движений, что с успехом осуществил Бернштейн.
До работ Н. А. Бернштейна в физиологии бытовало мнение (которое излагалось и в учебниках), что двигательный акт организуется следующим образом: на этапе обучения движению в двигательных центрах формируется и фиксируется его программа; затем в результате действия какого-то стимула она возбуждается, в мышцы идут моторные командные импульсы, и движение реализуется. Таким образом, в самом общем виде механизм движения описывался схемой рефлекторной дуги: стимул - процесс его центральной переработки (возбуждение программ) - двигательная реакция.
Первый вывод, к которому пришел Н. А. Бернштейн, состоял в том, что так не может осуществляться сколько-нибудь сложное движение. Вообще говоря, очень простое движение, например коленный рефлекс или отдергивание руки от огня, может произойти в результате прямого проведения моторных команд от центра к периферии. Но сложные двигательные акты, которые призваны решить какую-то задачу, достичь какого-то результата, так строиться не могут. Главная причина состоит в том, что результат любого сложного движения зависит не только от собственно управляющих сигналов, но и от целого ряда дополнительных факторов .
Общие свойства: все они вносят отклонения в запланированный ход движения, сами же не поддаются предварительному учету. В результате окончательная цель движения может быть достигнута, только если в него будут постоянно вноситься поправки, или коррекции. А для этого ЦНС должна знать, какова реальная судьба текущего движения. Иными словами, в ЦНС должны непрерывно поступать афферентные сигналы, содержащие информацию о реальном ходе движения, а затем перерабатываться в сигналы коррекции.
1.1. Принцип сенсорных коррекций.
Н. А. Бернштейн предложил совершенно новый принцип управления движениями, который был назван принципом сенсорных коррекций. Рассмотрим факторы, которые, по мнению Бернштейна, оказывают влияние на ход выполнения движения.
Во-первых, это реактивные силы . И рассматривал пример: например, если человек сильно взмахнет рукой, то в других частях тела у него разовьются реактивные силы, которые изменят их положение и тонус.
Во-вторых, это инерционные силы. Если человек резко поднимет руку, то она взлетает вверх не только за счет тех моторных импульсов, которые посланы в мышцы, но с какого-то момента движется по инерции, т. е. возникают определенные инерционные силы. Н. А. Бернштейн считал, что явление инерции присутствует в любом движении.
В-третьих, это внешние силы , которые оказывают влияние на ход выполнения движения. Пример: если движение направлено на какой-либо предмет, то оно встречает с его стороны сопротивление. И это сопротивление чаще всего оказывается непредсказуемым.
Четвертый фактор, по мнению Н. А. Бернштейна: существует еще один фактор, который не всегда учитывается при начале выполнения движений, - это исходное состояние мышц. Состояние мышцы меняется при выполнении движения вместе с изменением ее длины, а также в результате утомления и других причин. Поэтому один и тот же моторный импульс, достигнув мышцы, может дать совершенно иной результат.
Существует целый перечень факторов, оказывающих непосредственное воздействие на ход выполнения движения. Центральной нервной системе, по мнению Бернштейна необходима постоянная информация о ходе выполнения движения. Эта информация получила название сигналов обратной связи. Эти сигналы могут одновременно поступать от мышц в мозг по нескольким каналам. Он приводит пример: когда мы двигаемся, информация о положении отдельных частей тела поступает от проприоцептивных рецепторов. Однако параллельно информация поступает через органы зрения. Аналогичная картина наблюдается даже при выполнении речевых движений. Человек получает информацию не только от рецепторов, контролирующих движения языкового аппарата, но и через слух. Причем информация, поступающая по разным каналам, должна быть согласованной, иначе выполнение движения становится невозможным.
1.2.Схема рефлекторного кольца.
Существует определенная схема осуществления механизмов движения. Она была названа Бернштейном схемой рефлекторного кольца. Эта схема основана на принципе сенсорных коррекций и является его дальнейшим развитием.
В упрощенном виде эта схема выглядит так: из моторного центра (М) в мышцу (рабочую точку мышцы) поступают эффекторные команды. От рабочей точки мышцы идут афферентные сигналы обратной связи в сенсорный центр. В ЦНС происходит переработка поступившей информации, т. е. перешифровка ее в моторные сигналы коррекции, после чего сигналы вновь поступают в мышцу. Получается кольцевой процесс управления.
 |
Принципиальное различие концепций построения движений на основе рефлекторной дуги и рефлекторного кольца.
В этой схеме рефлекторная дуга выглядит как один из ее частных случаев, когда совершаются движения, не нуждающиеся в коррекции, т. е. движения рефлекторной природы. Позднее Бернштейн детализировал схему рефлекторного кольца. В схеме присутствуют следующие элементы: моторные «выходы» (эффектор), сенсорные «входы» (рецептор), рабочая точка или объект (если речь идет о предметной деятельности), блок перешифровки, программа, регулятор, задающий прибор, прибор сличения.
С наличием большего количества элементов рефлекторное кольцо функционирует таким образом: в программе записаны последовательные этапы сложного движения. В каждый конкретный момент отрабатывается какой-то частный этап или элемент, соответствующая частная программа запускается в задающий прибор. Из задающего прибора сигналы (SW - «то, что должно быть») поступают на прибор сличения. На тот же блок от рецептора приходят сигналы обратной связи (IW - «то, что есть»), сообщающие о состоянии рабочей точки. В приборе сличения эти сигналы сравниваются, и на выходе из него получаются сигналы рассогласования (В\У) между требуемым и фактическим положением вещей. Далее они попадают на блок перешифровки, откуда выходят сигналы коррекции, которые через промежуточные инстанции (регулятор) попадают на эффектор.
Уровни построения движения - Своими исследованиями Н. А. Бернштейн (1896-1966) показал и доказал, что двигательная деятельность осуществляется не посредством рефлекторной дуги (как это считал Павлов и его последователи), а посредством так называемого рефлекторного кольца (благодаря наличию обратной связи). Это позволило Бернштейну построить обоснованную и доказанную теорию уровневого построения движений.
Основные идеи
1. В организации конкретного движения обычно участвует сразу несколько уровней: тот, на котором строится движение и все нижележащие. В каком-то смысле это похоже на войсковую операцию: общий ход её и задачи определяются на одном из уровней командования, в реализации операции обычно участвует этот уровень и нижележащие, заканчивая исполнителями (солдатами).
2. Одно и то же движение может строиться на разных ведущих уровнях (инициироваться разными уровнями), с разным качеством исполнения, но всё же одно и то же. Бег, например, может строиться на уровне C, D или E. В первом случае особенности бега почти не контролируются сознанием, в нём отражается простое "бегу" или "бегу туда-то". Во втором и третьем случаях контроль сознания за процессом бега значительно выше: контролируются конкретные особенности бега, связь с какими-то предметами (например футбольным мячом) или даже использование бега не для перемещения в пространстве, а для каких-то сложных задач (например тренер может изобразить своим бегом как бегает какой-то другой человек; в конце концов бегом можно - если очень захочется - даже передавать азбуку Морзе).
3. Уровни построения движения имеют "постоянное место прописки" в отдельных "слоях" центральной нервной системы, в которой выделяются уровни спинного мозга, продолговатого, подкорковых центров, коры. Каждый уровень связан со специфическими, филогенетически сложившимися моторными проявлениями, каждому уровню соответствует свой класс движений.
Уровень A
Уровень тонуса. Самый низкий и филогенетически самый древний (его корни надо искать в далёком прошлом, когда живое ещё только научилось двигаться). У человека он отвечает за тонус мышц. На этот уровень поступают сигналы от мышечных проприорецепторов, сообщающих таким образом о степени напряжения мышц. Типичное самостоятельное проявление этого уровня - дрожание тела от холода или от страха.
Уровень B
Уровень синергий. Принимая информацию с уровня A, а также "установки" с вышележащих уровней, этот уровень организует работу "временных ансамблей" (синергий). То есть основная задача этого уровня - координация напряжения отдельных мышц. Типичное самостоятельное проявление этого уровня - потягивания, непроизвольная мимика, простые рефлексы (например отдёргивание руки от горячего).
Уровень C
Уровень пространственного поля. Уровень C получает информацию от уровня B, "установки" от вышележащих уровней, а также - что весьма важно - собирает всю доступную информацию от органов чувств о внешнем пространстве. На этом уровне строятся простые, беспредметные движения в пространстве. Бег, размахивание руками - типичные самостоятельные проявления.
Уровень D
Уровень предметных действий. Локализация его находится уже в коре головного мозга. Он отвечает за организацию взаимодействия с предметами. В том числе на этом уровне в результате опыта откладываются представления об основных физических характеристиках окружающих предметов. Большое значение для функционирования этого уровня имеет понятие цели, то есть желательного положения предметов в итоге действия.
Уровень E
Уровень интеллектуальных двигательных актов. Наивысший уровень. К этому уровню относятся такие движения как речевые, письмо, символическая или кодированная речь. В каком-то смысле этот уровень можно было бы назвать "беспредметным", потому что в отличие от уровня D здесь движения определяются не предметным, а отвлечённым смыслом. Если, например, человек пишет записку своему знакомому, то физически он имеет контакт лишь с бумагой и карандашом, но та линия, которая образуется на бумаге, определяется целой плеядой отвлечённых смыслов: представлением об отсутствующем человеке, о его личностных особенностях, о целях и задачах в отношении этого человека, о возможности реализовать эти цели и задачи через письмо, а также другими смыслами.